|
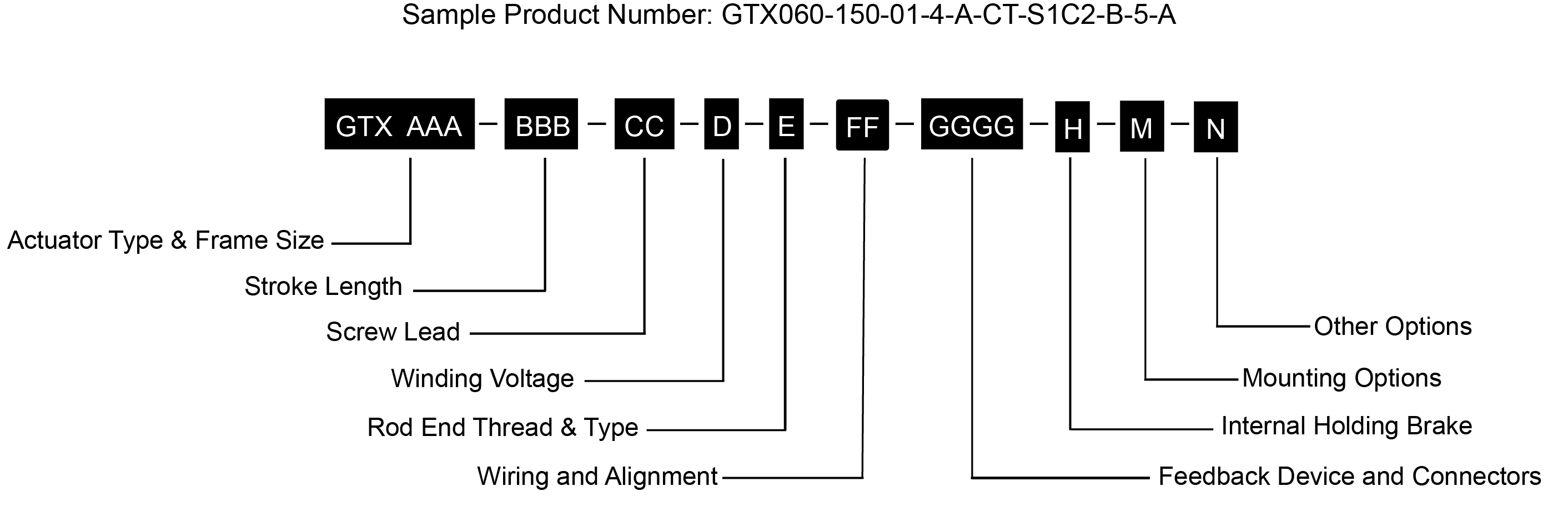
AAA = GTX Integrated Motor / Actuator
060 = 60 mm (2.36 in)
080 = 80 mm (3.15 in)
100 = 100 mm (3.94)
BBB = Stroke Length
080 = 80 mm (GTX060)
100 = 100 mm (GTX060, GTX080)
150 = 150 mm
300 = 300 mm
450 = 450 mm (GTX080)
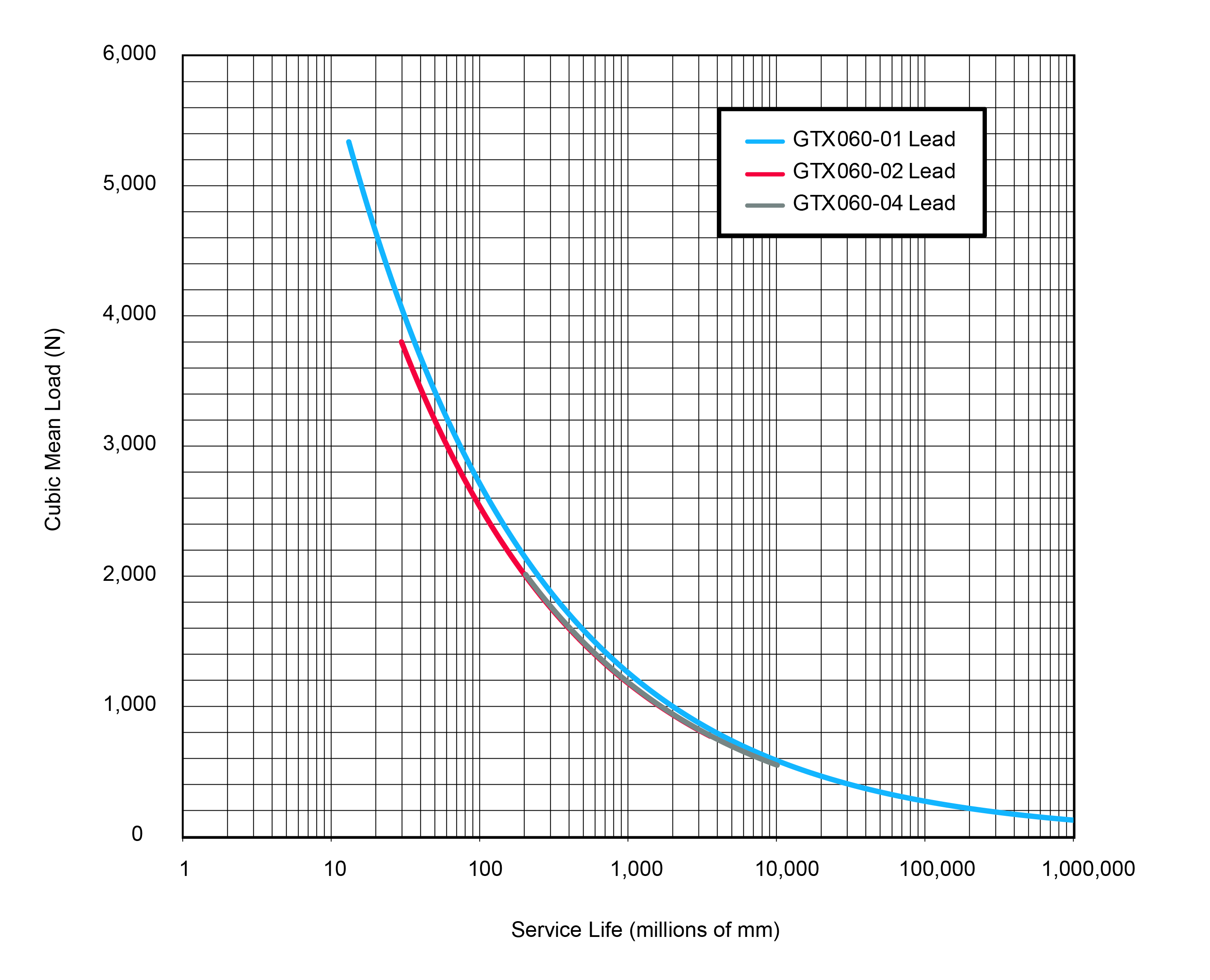
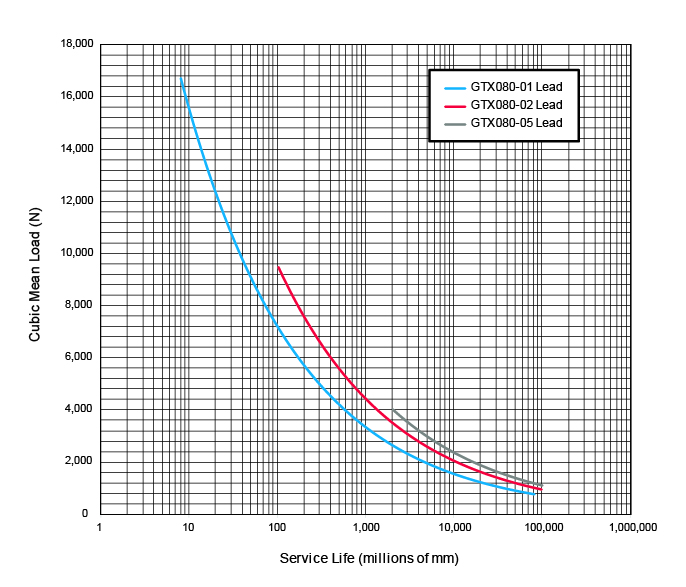
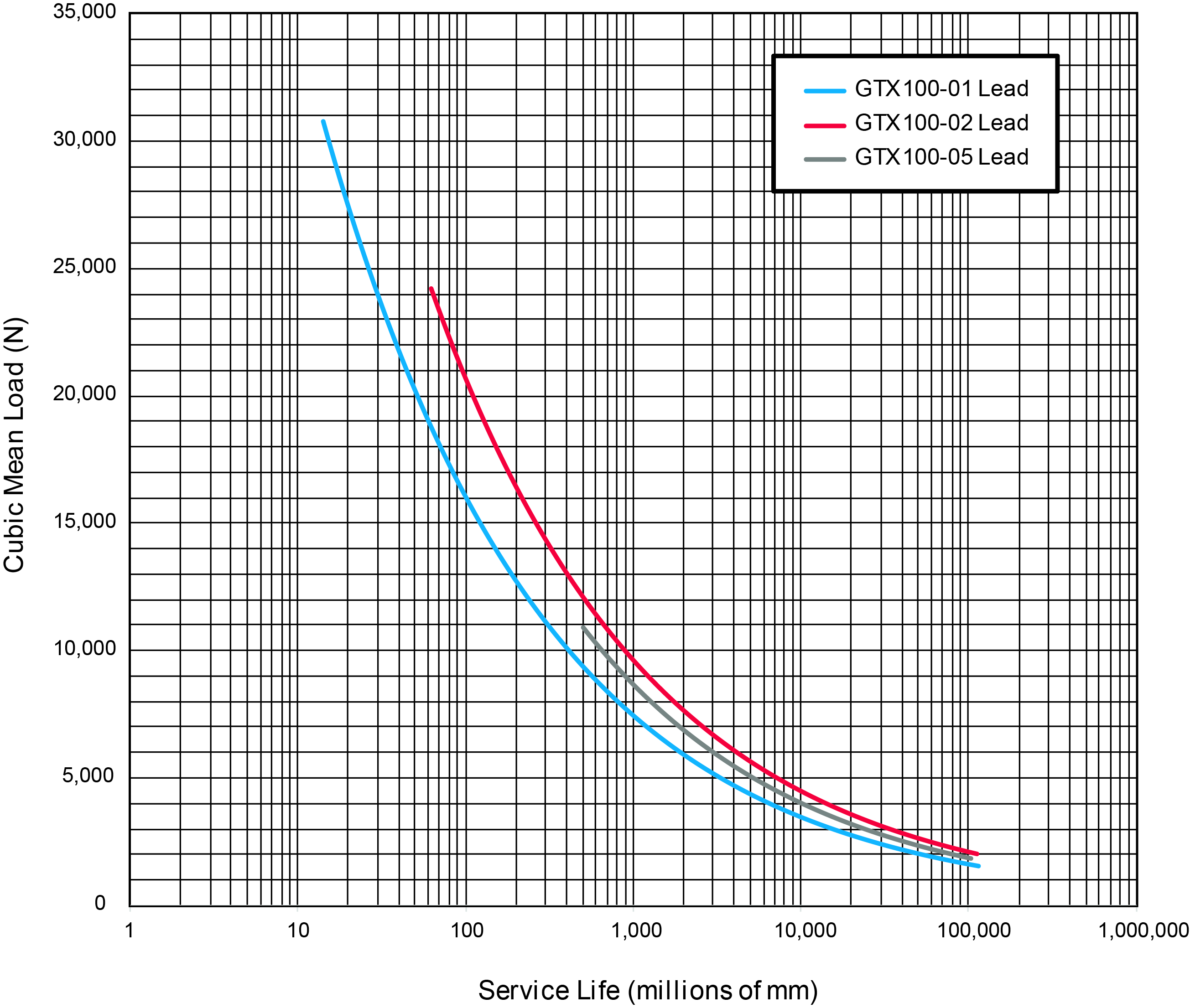
CC = Screw Lead
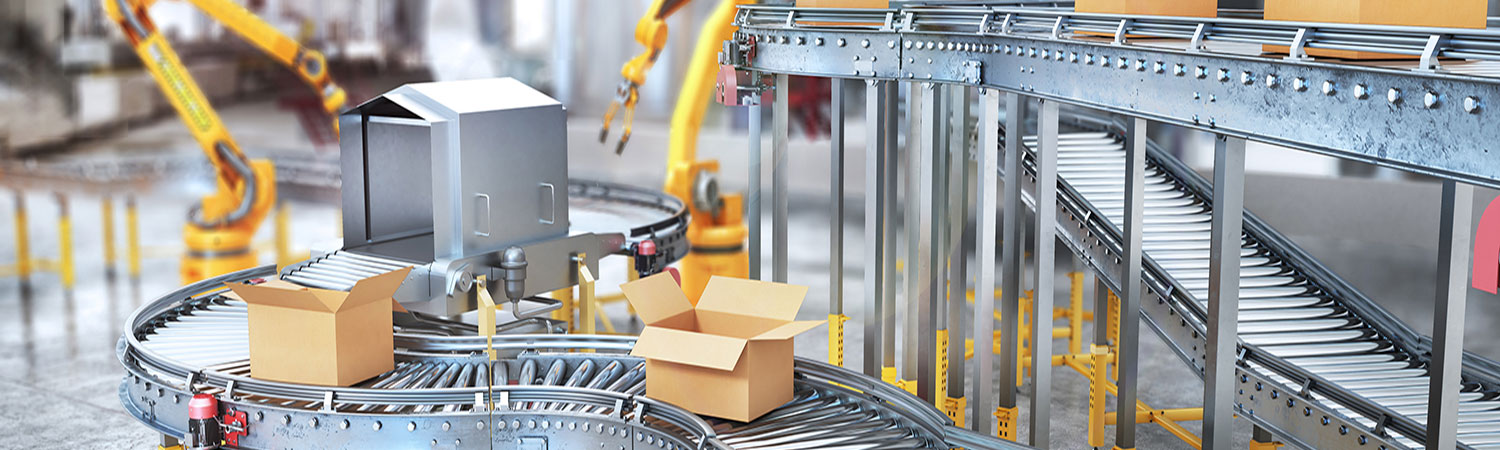
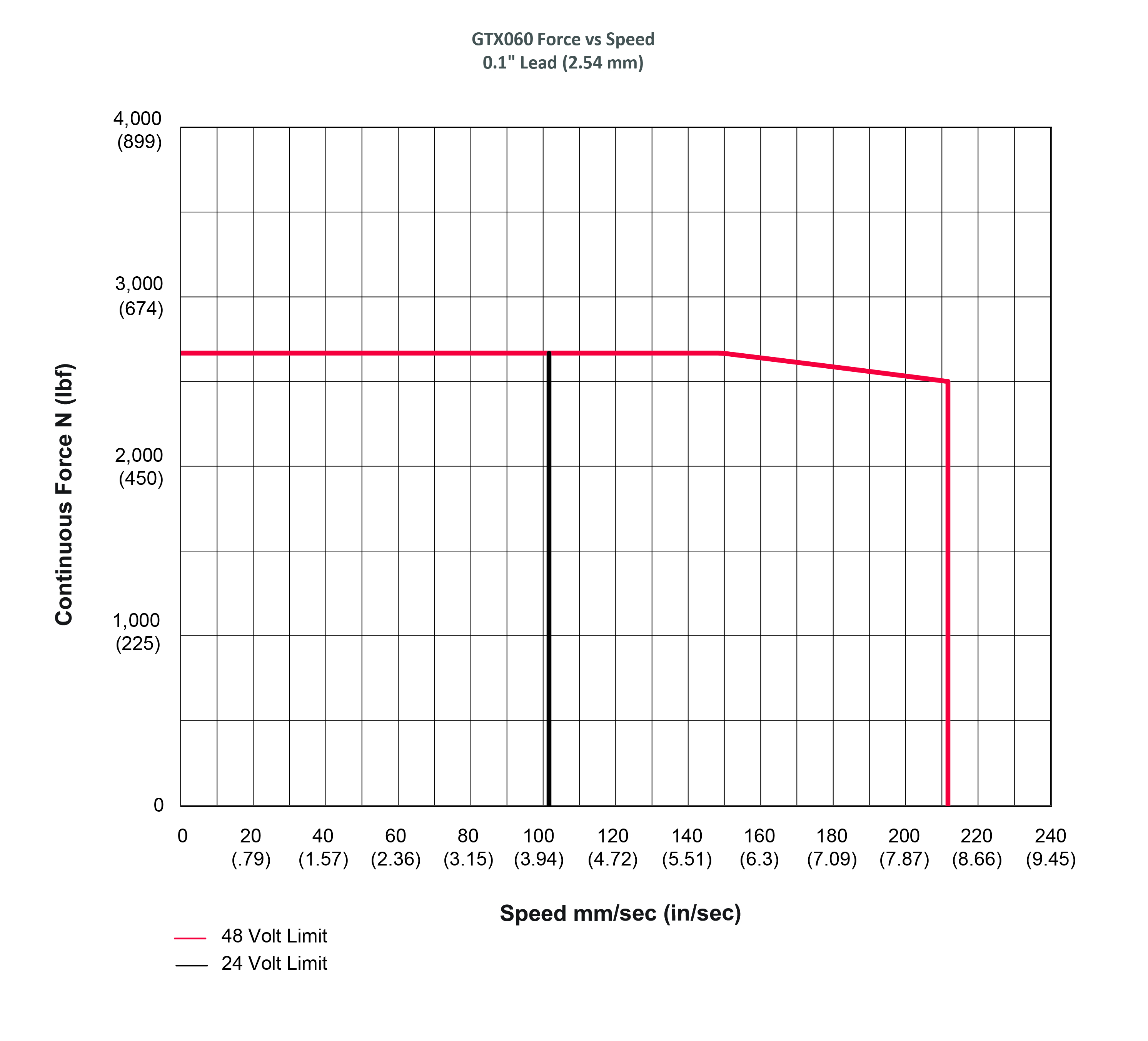
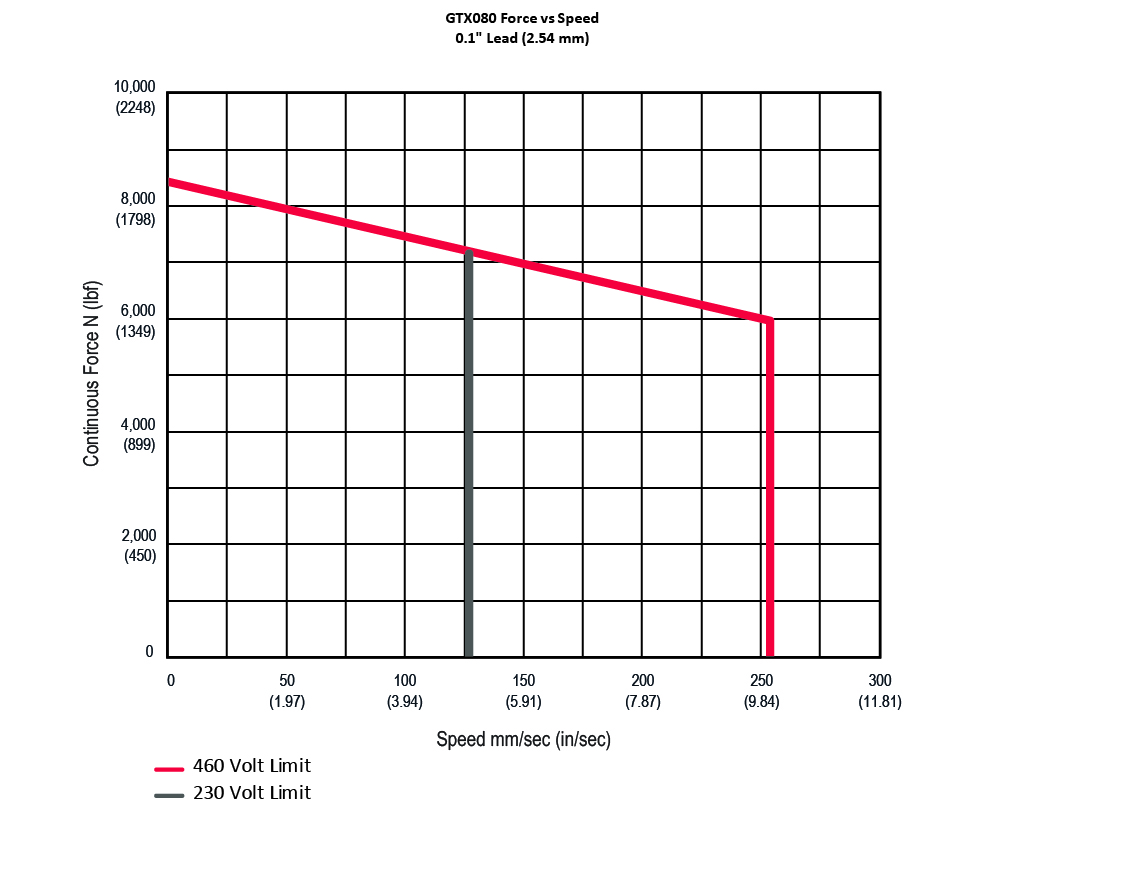
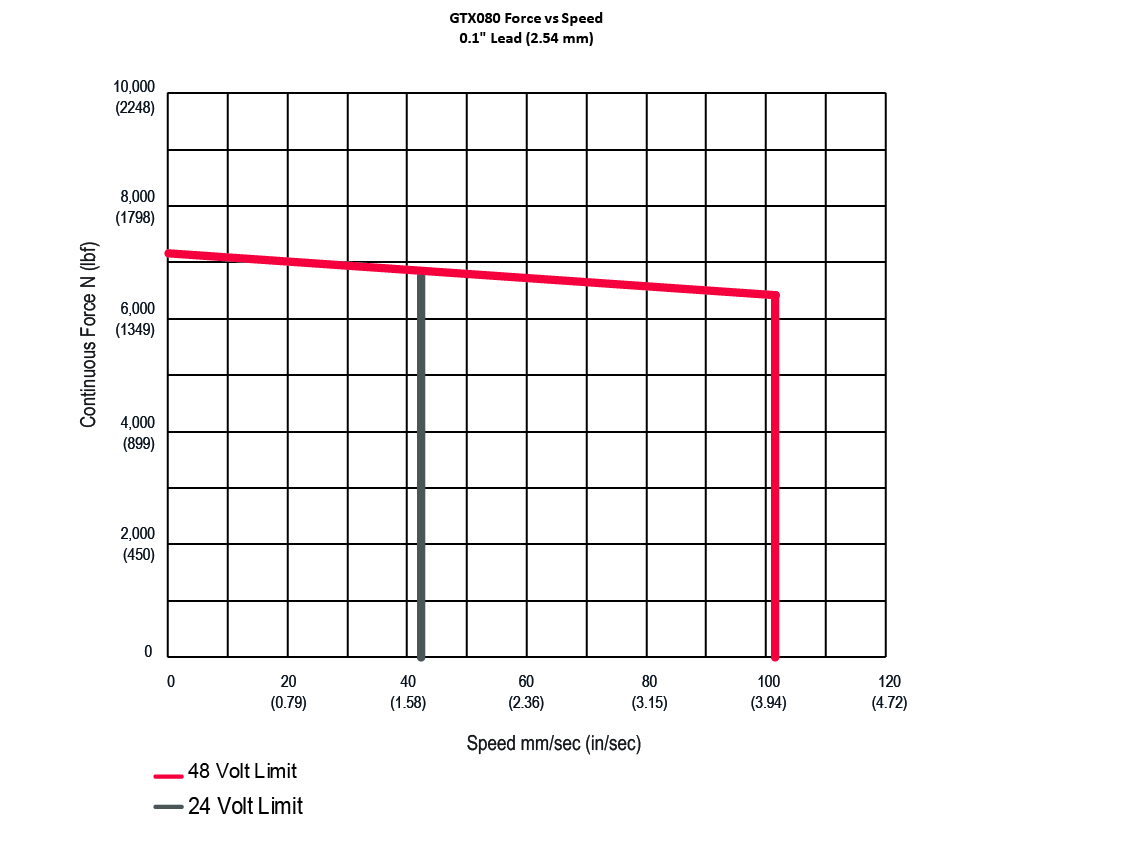
01 = 2.54 mm (0.10 in)
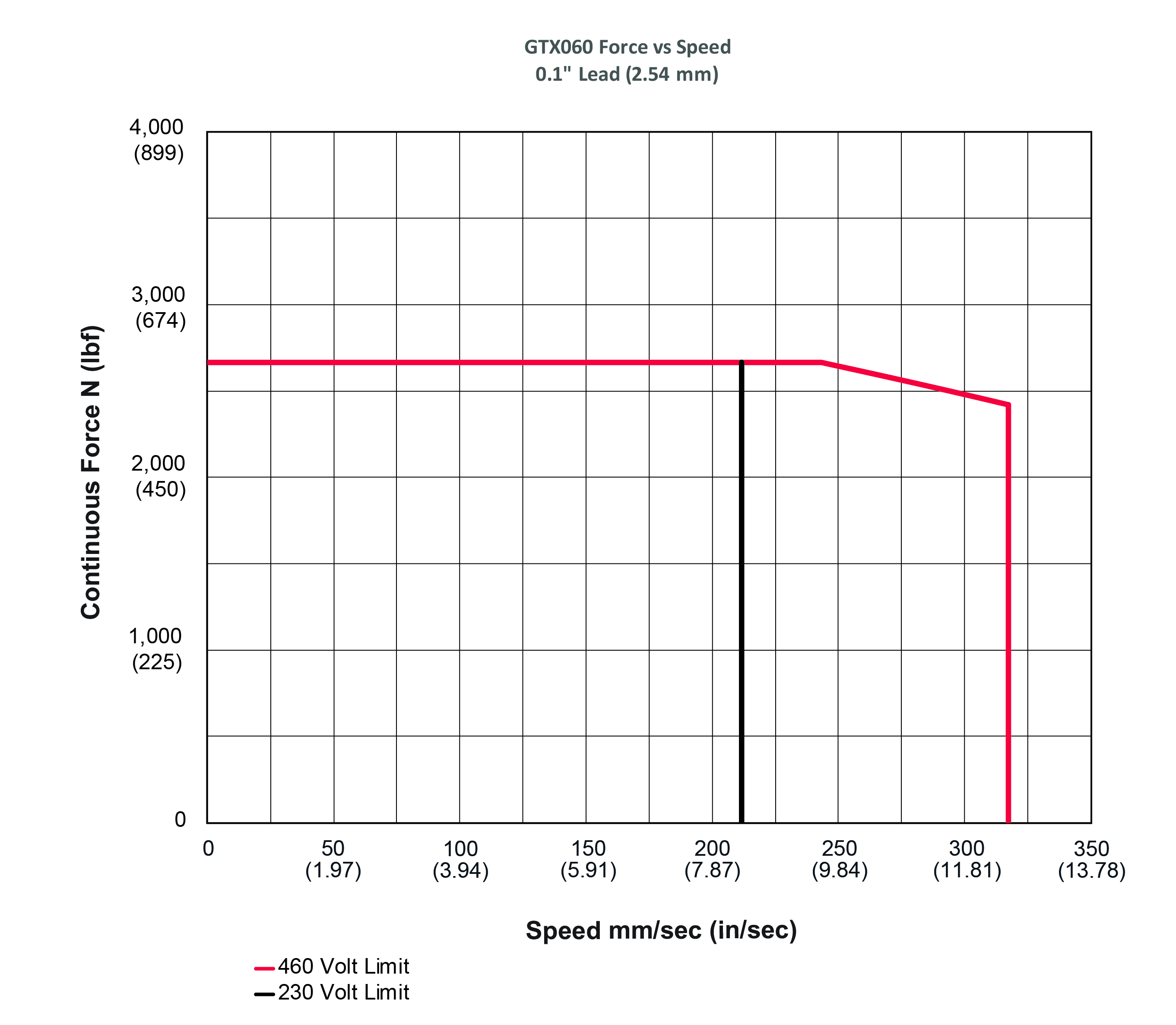
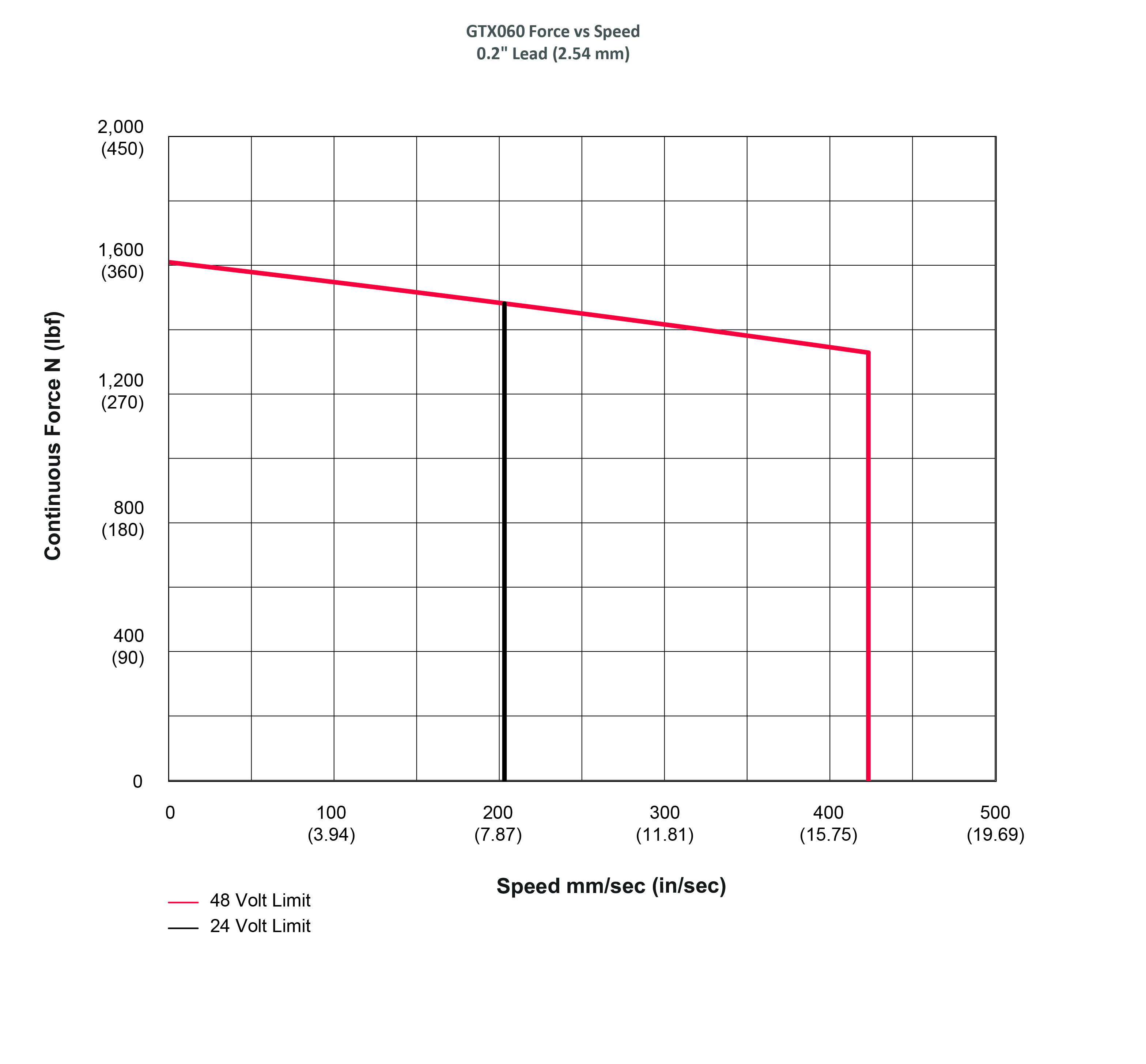
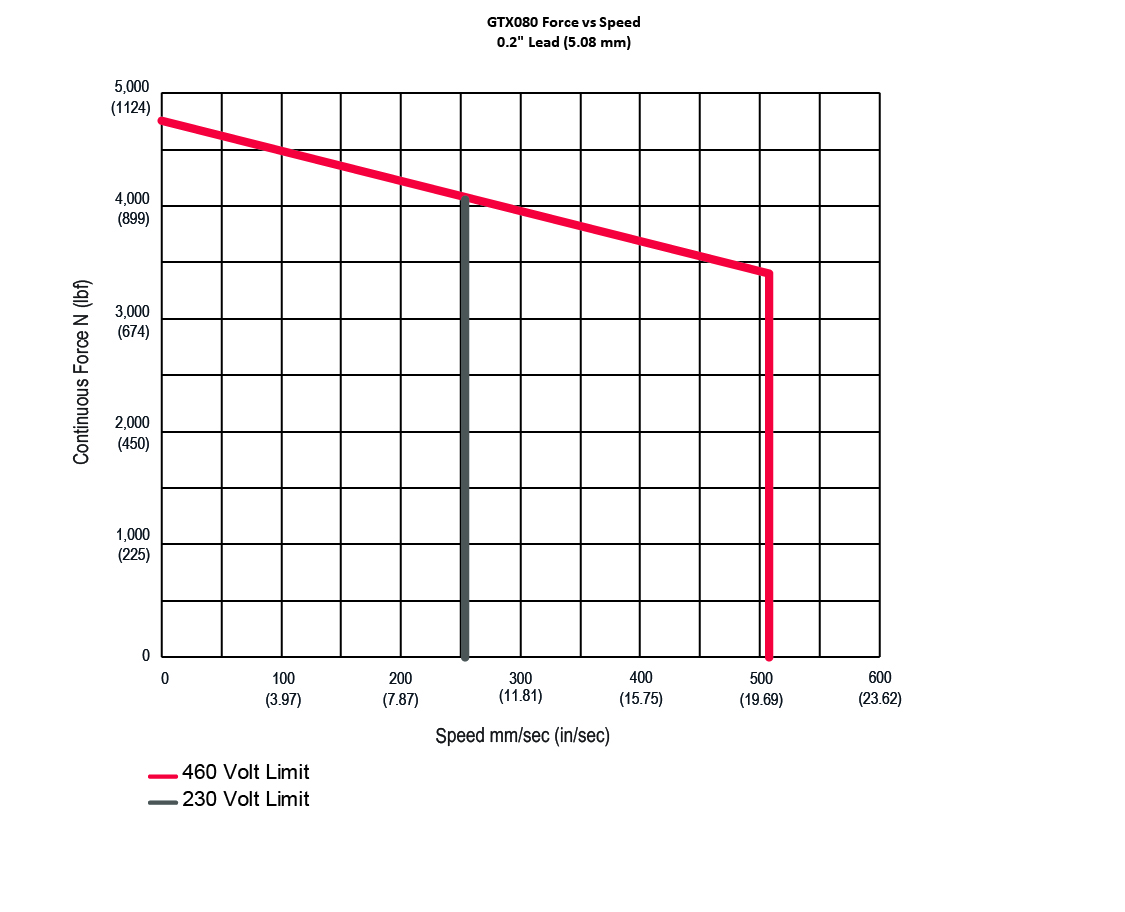
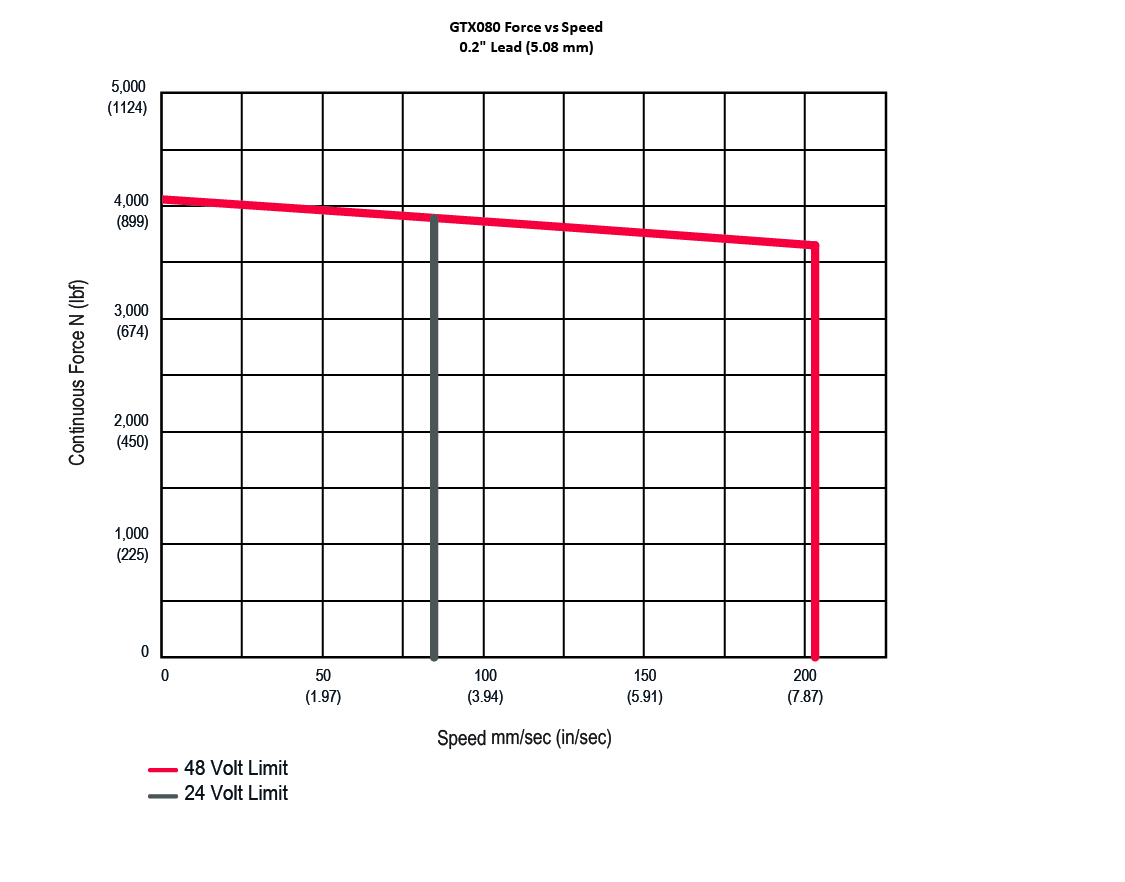
02 = 5.08 mm (0.20 in)
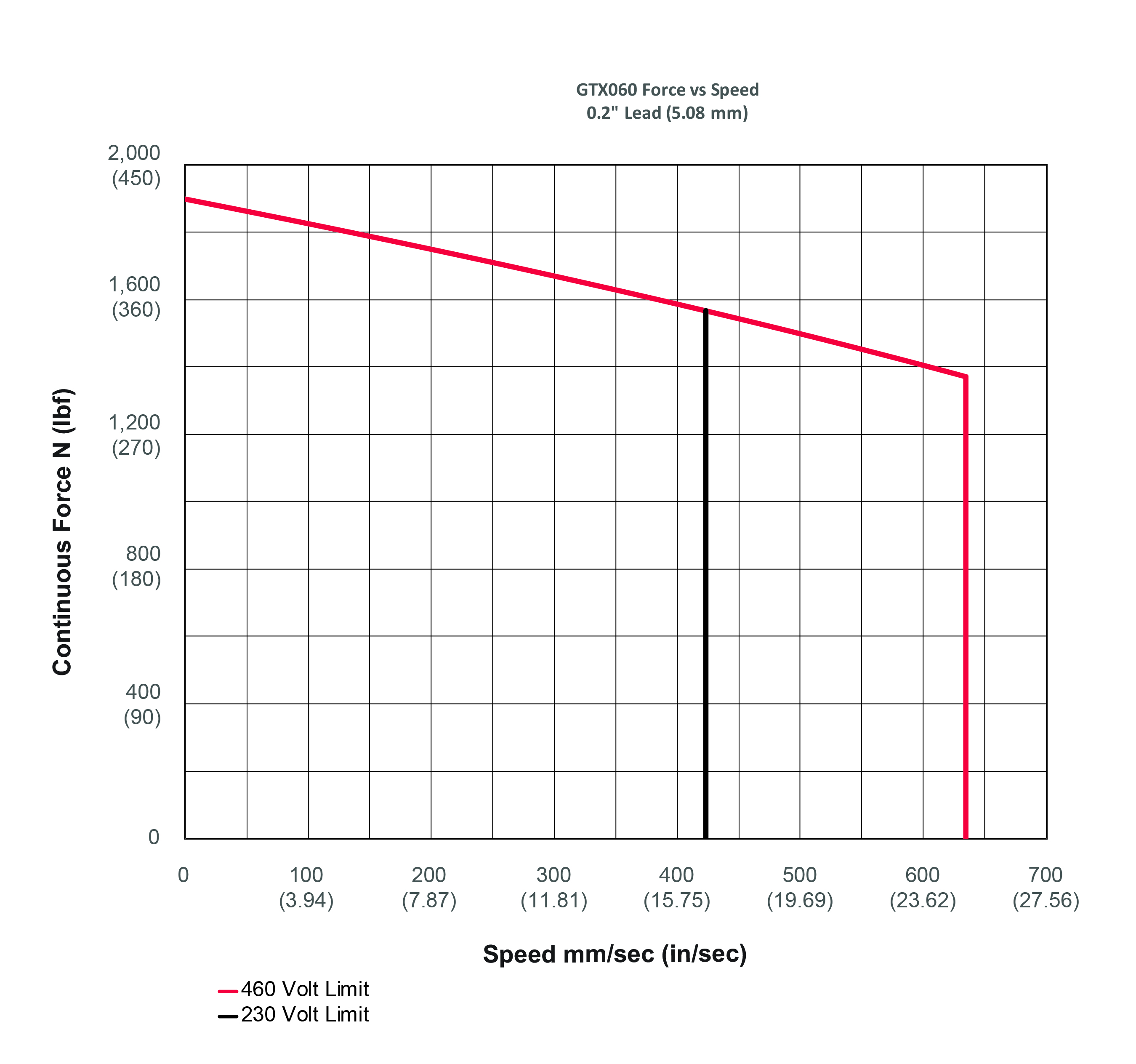
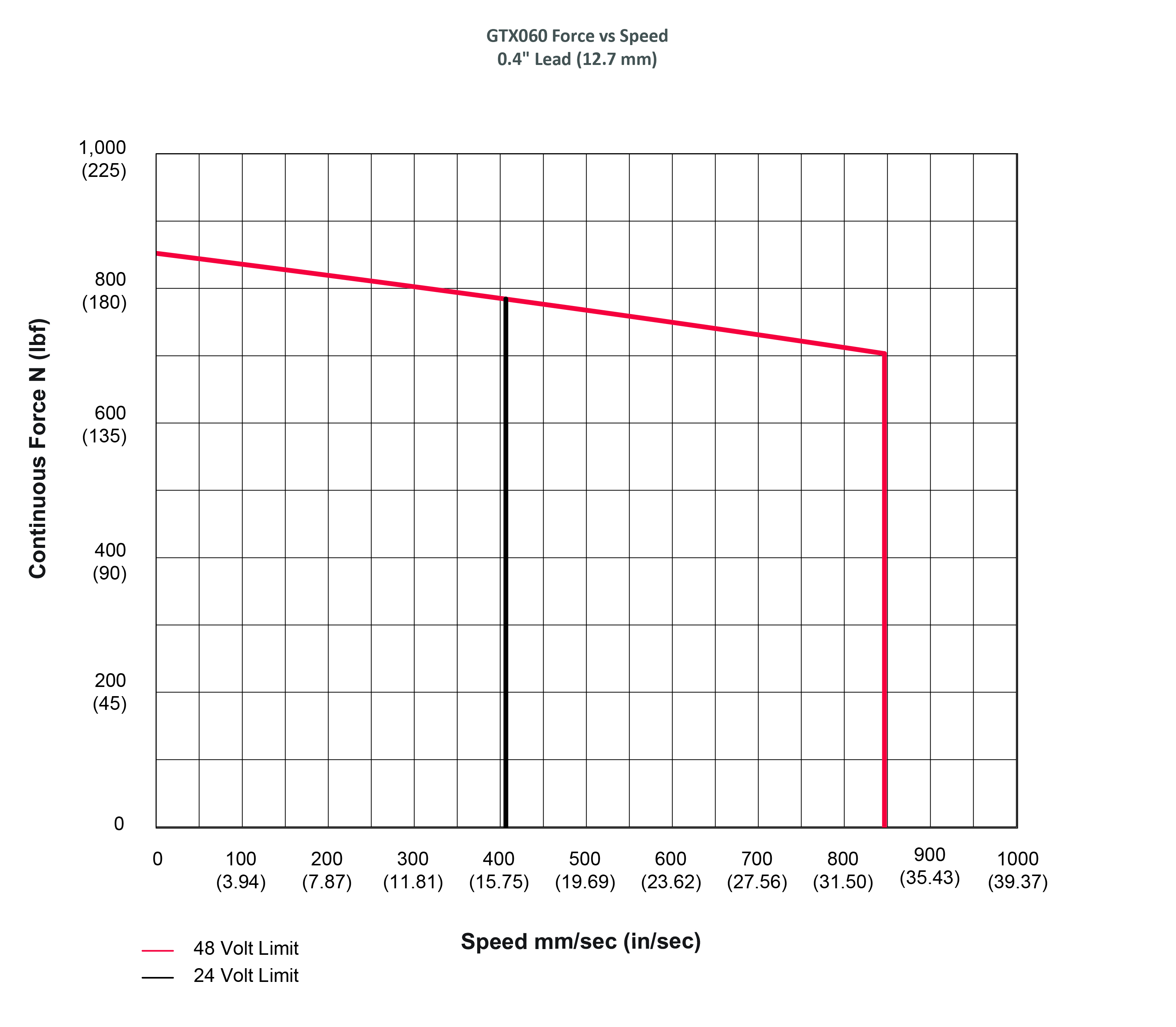
04 = 10.16 mm (0.40 in) GTX060
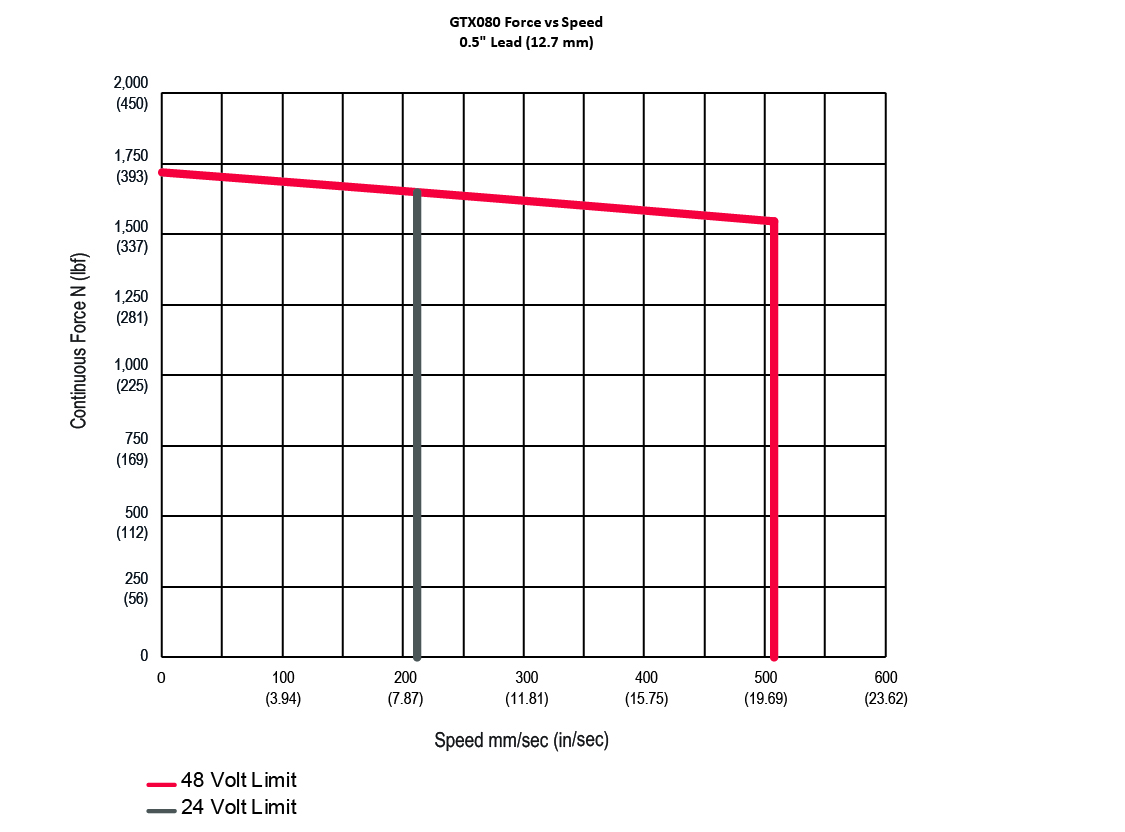
05 = 12.7 mm (0.50 in)
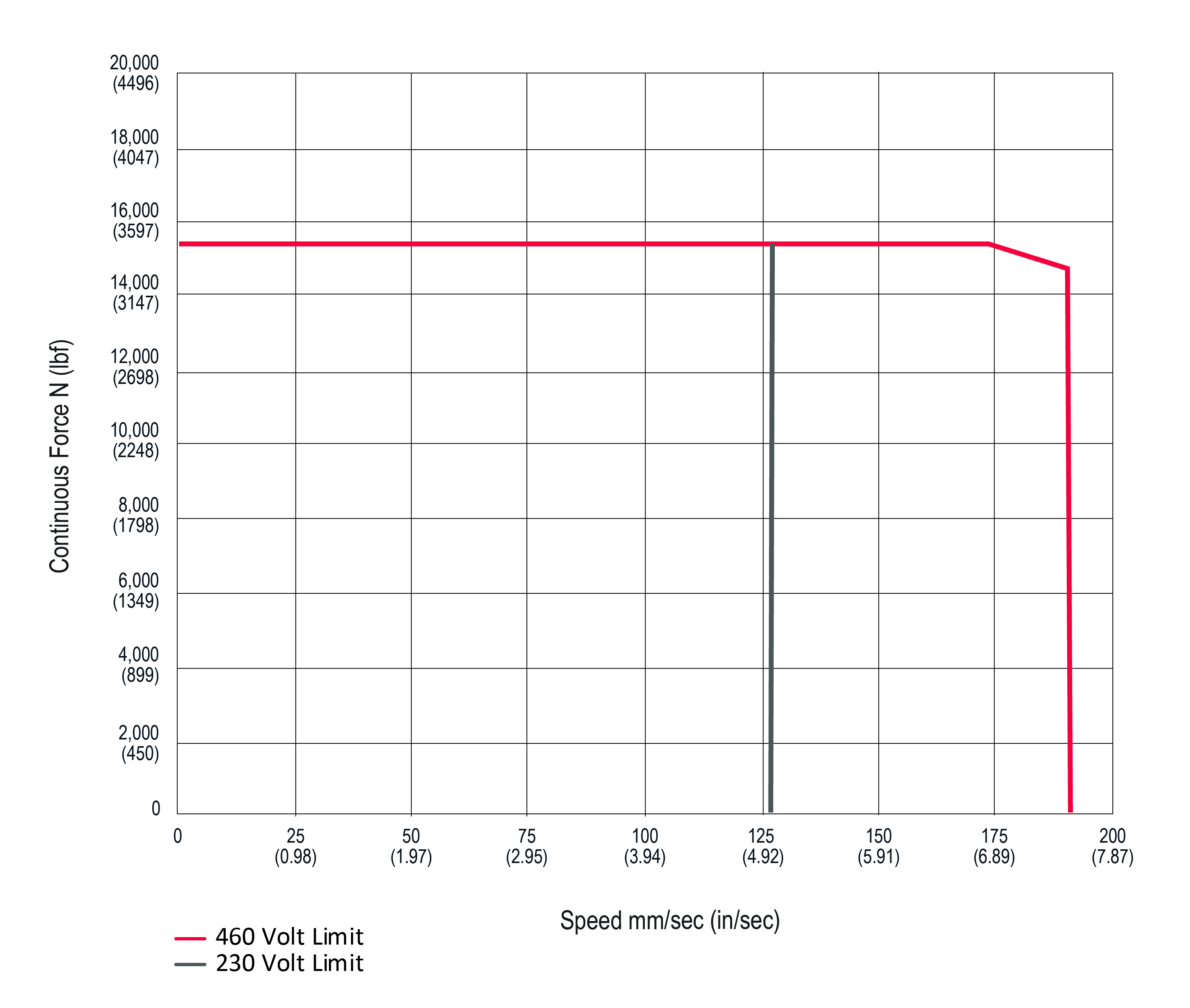
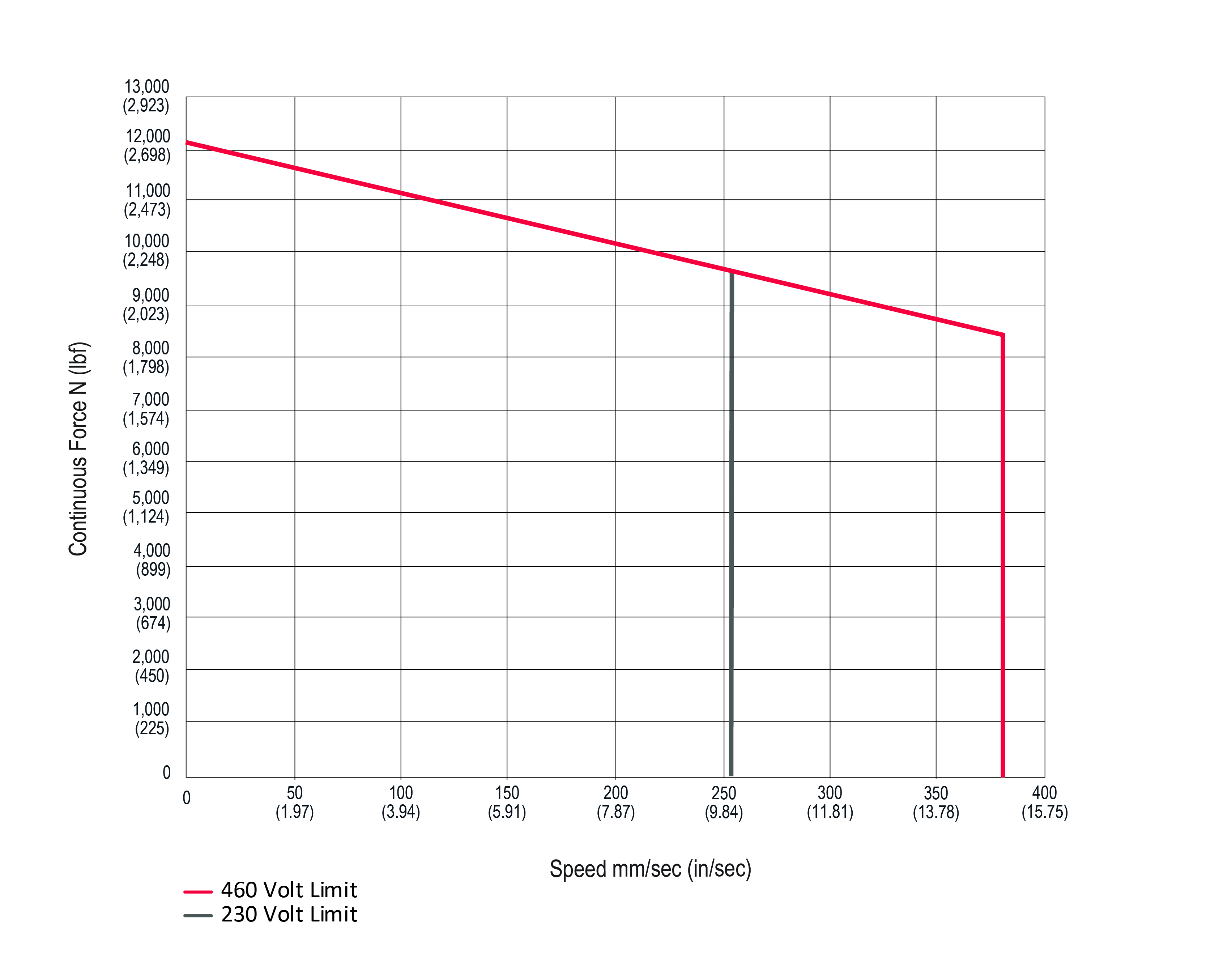
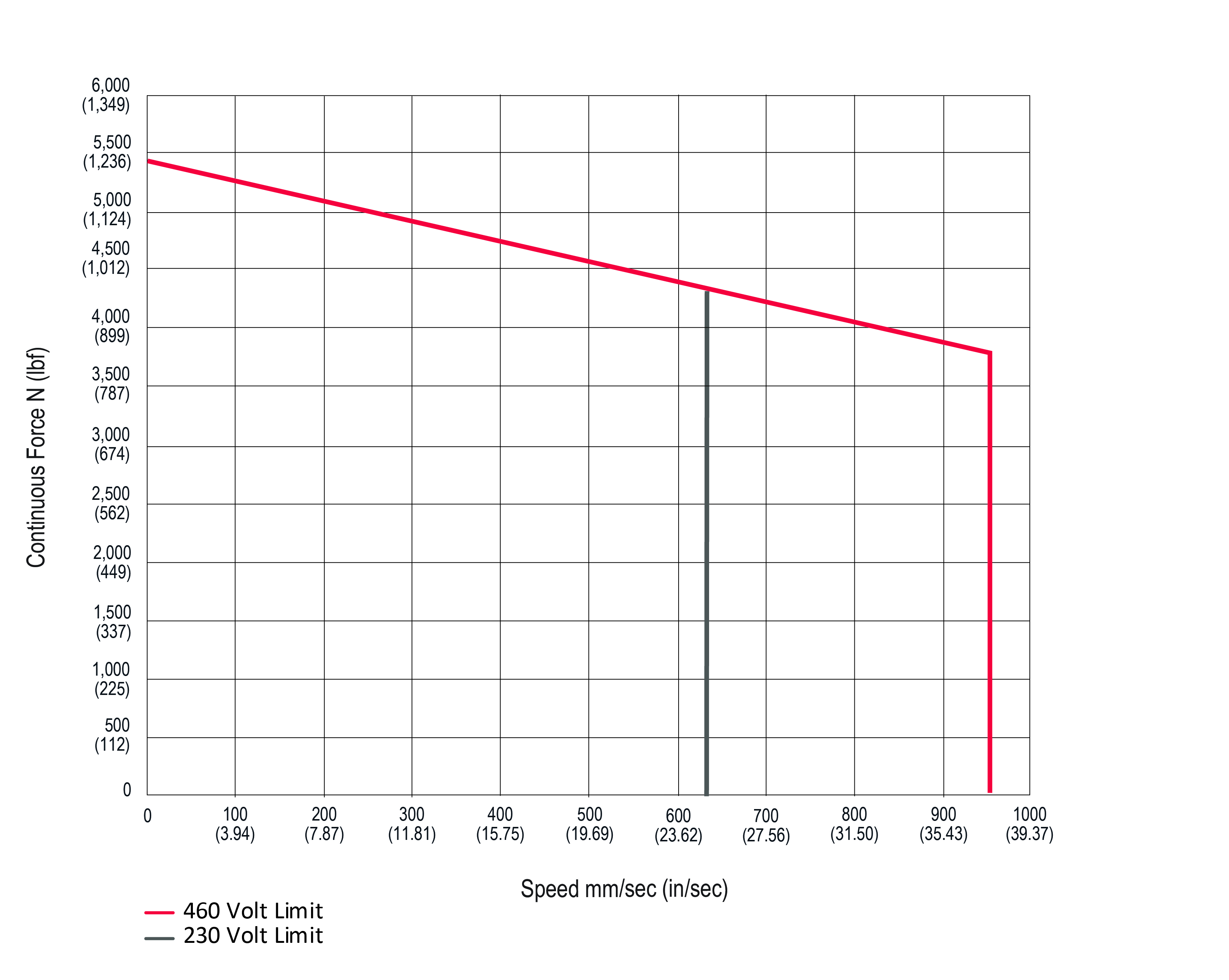
D = Winding Voltage
4 = 460 VAC Max
D = 48 VDC Max (GTX060, GTX080)
E = Rod End Thread & Type
A = Male Metric Thread
B = Female Metric Thread
C = Male Metric Thread, Splined2
D = Female Metric Thread, Splined2
F = Female Standard Thread
G = Male Standard Thread, Splined2
H = Female Standard Thread, Splined2
L = Female Metric Thread, 17-4 SS
M = Male Standard Thread
R = Male Metric Thread, 17-4 SS
V = Female Standard Thread, 17-4 SS
W = Male Standard Thread, 17-4 SS
|
FF = Wiring and Alignment
AK = AMK
BR = B&R Automation
BD = Baldor
BE = Beckhoff
BM = Baumueller
CT = Control Techniques / Nidec
EU = Elau / Schneider Electric
EL = Elmo Motion Control
EX = Exlar
IF = Infranor
IN = Bosch-Rexroth
KM = Kollmorgen
LS = LTI
LZ = Lenze
PC = Parker
RA = Rockwell Automation
SM = Siemens
SB = Stober Drives
GGGG = Feedback Device and Connectors
See table below
H= Internal Holding Brake
N = No Brake
B = Internal Holding Brake, Electronically Released
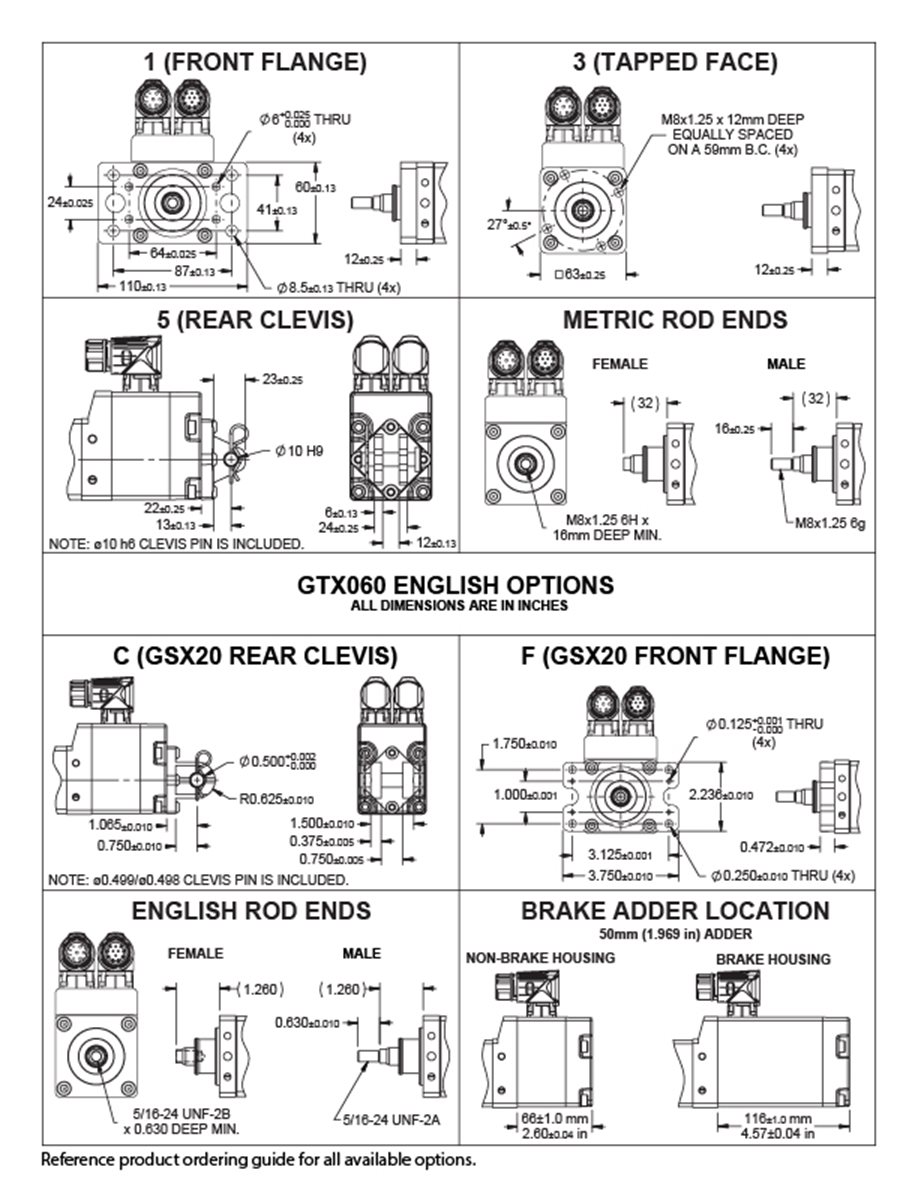
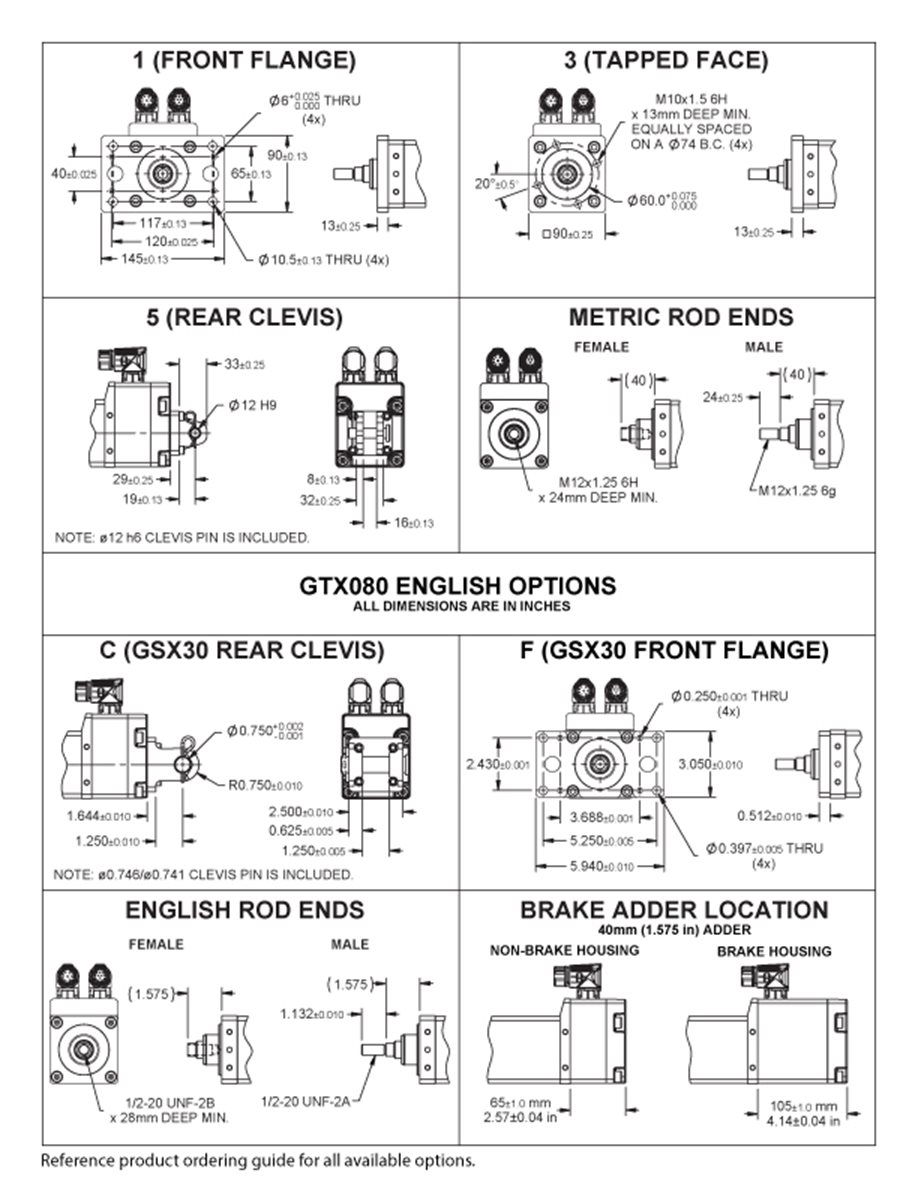
M = Mounting Options
N = None
1 = Front Flange, Metric
3 = Tapped Face, Metric
5 = Rear Clevis, Metric
F = Front Flange, Standard
C = Rear Clevis, Standard
N = Other Options
N = None
A = Anti-Rotate Assembly, External
L = Limit Switch Housing/ Anti-Rotate Assembly1
|
NOTES:
1 Switches sold separately
2 Splined Rod (Internal Anti-Rotate) option reduces IP rating.
|
Drive Manufacturer
|
Wiring &
Alignment Code
|
Resolver
|
Incremental
Encoder
|
SICK Hiperface Absolute Encoder
|
SICK Hiperface DSL Absolute Encoder
|
Heidenhain EnDat 2.1 Absolute Encoder 1
|
Heidenhain EnDad 2.2 Absolute Encoder 2 |
|
AMK
|
AK
|
R1A1
|
|
|
|
H1A1
|
|
|
B&R Automation
|
BR
|
R1A1
|
|
|
|
H1A2
|
H3A83 |
|
Baldor
|
BD
|
R1A1
|
|
|
|
H1A1
|
|
|
Baumueller
|
BM
|
R1A1
|
|
S1A1
|
|
H1A2
|
|
|
Beckhoff
|
BE
|
|
|
|
S4C03
|
H1A2,
|
H3C23 |
|
Control Techniques
|
CT
|
R2B1
|
E1B2
|
S1B1
|
|
H1B2
|
|
|
Elau
|
EU
|
|
|
S1A14
|
|
|
|
|
Elmo Motion Control
|
EL
|
R1B1
|
E1B2
|
|
|
H1A2
|
|
|
Exlar
|
EX
|
R1A1
|
E1A2
|
S1A2
|
|
H1A2
|
|
|
Infranor
|
IF
|
R1B2
|
|
S1B2
|
|
|
|
|
Bosch-Rexroth
|
IN
|
|
|
S2D34
|
|
H1D3
|
|
|
Kollmorgan
|
KM
|
R2A1
|
E1A2
|
|
|
H1A2
|
|
|
LTI
|
LS
|
R2A1
|
|
S1A2
|
|
|
|
|
Lenze
|
LZ
|
R1B1
|
|
S1B1
|
|
|
|
|
Parker
|
PC
|
R1B1
|
E1B2
|
|
|
H1B2
|
|
|
Rockwell Automation
|
RA
|
|
E1C2
|
S1C24
|
S3CO4
|
|
|
|
Siemens
|
SM
|
R1B1
|
|
|
|
H1B2
|
|
|
Stober Drives
|
SB
|
R4A1
|
|
|
|
H1A1
|
|
1Synchronous serial EnDat 2.1 with 1 Vpp Incremental Signals (EnDat01)
2Synchronous serial EnDat 2.2 without Incremental Signals (EnDat22)
3Supports Functional Safety
4Encoder is pre-programmed for operation with the manufacturer's servo drives.
** Some options are not available with every configuration. For options or specials not listed above contact your local representative.
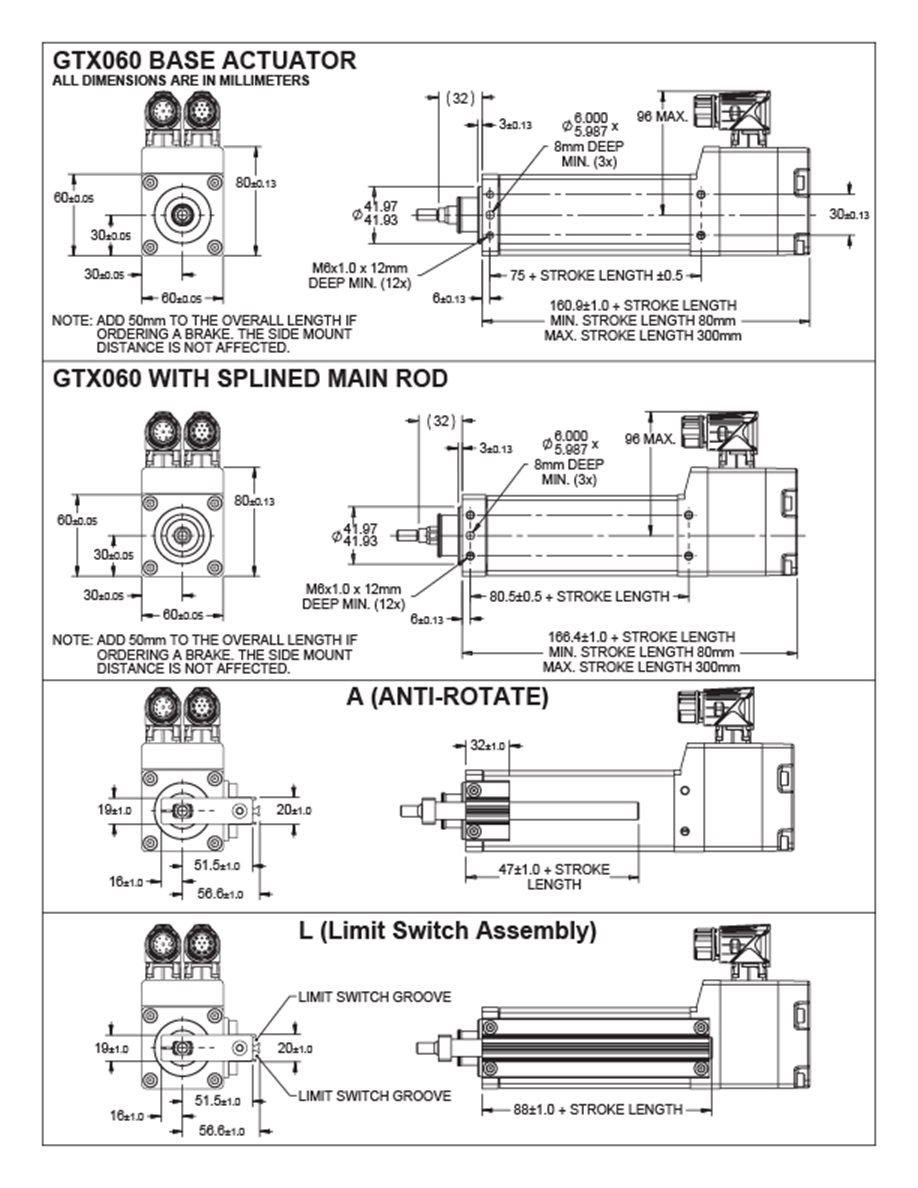
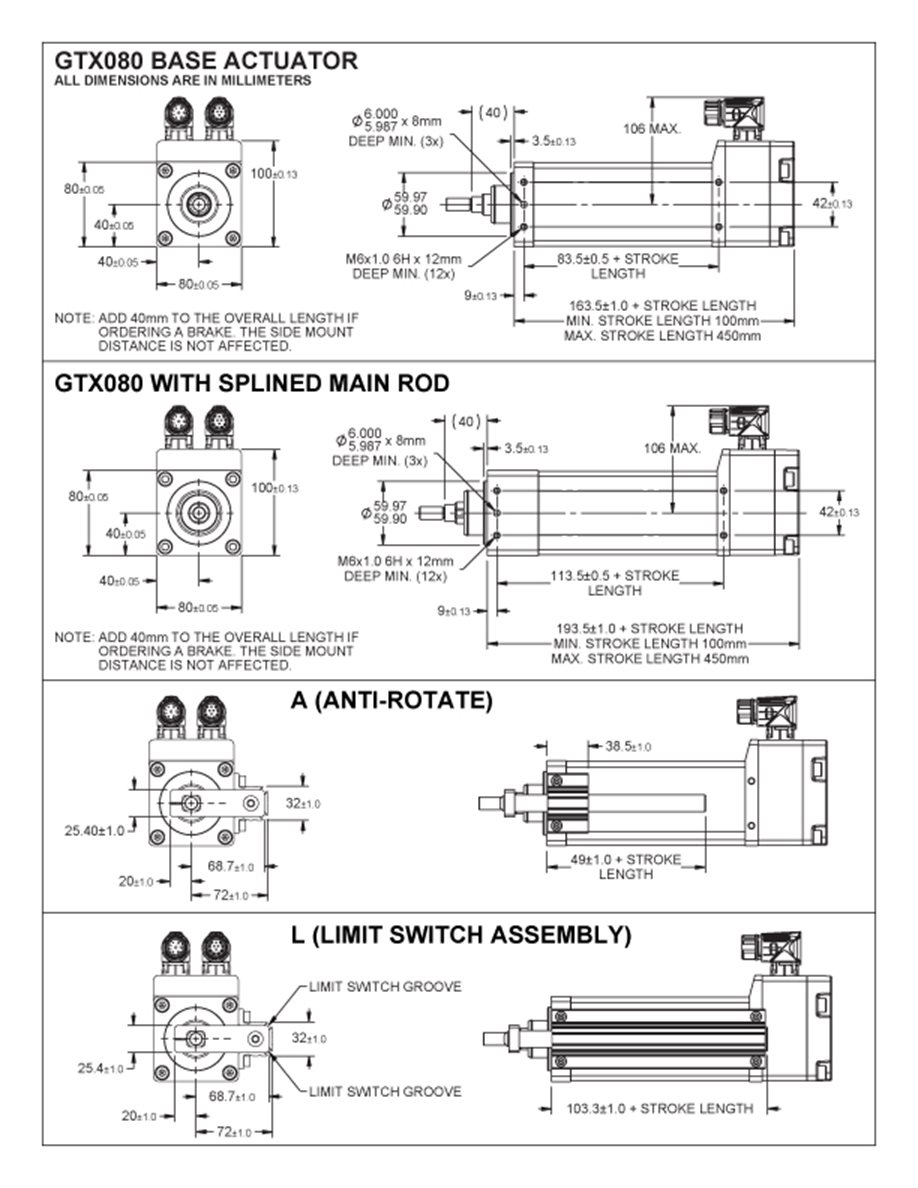
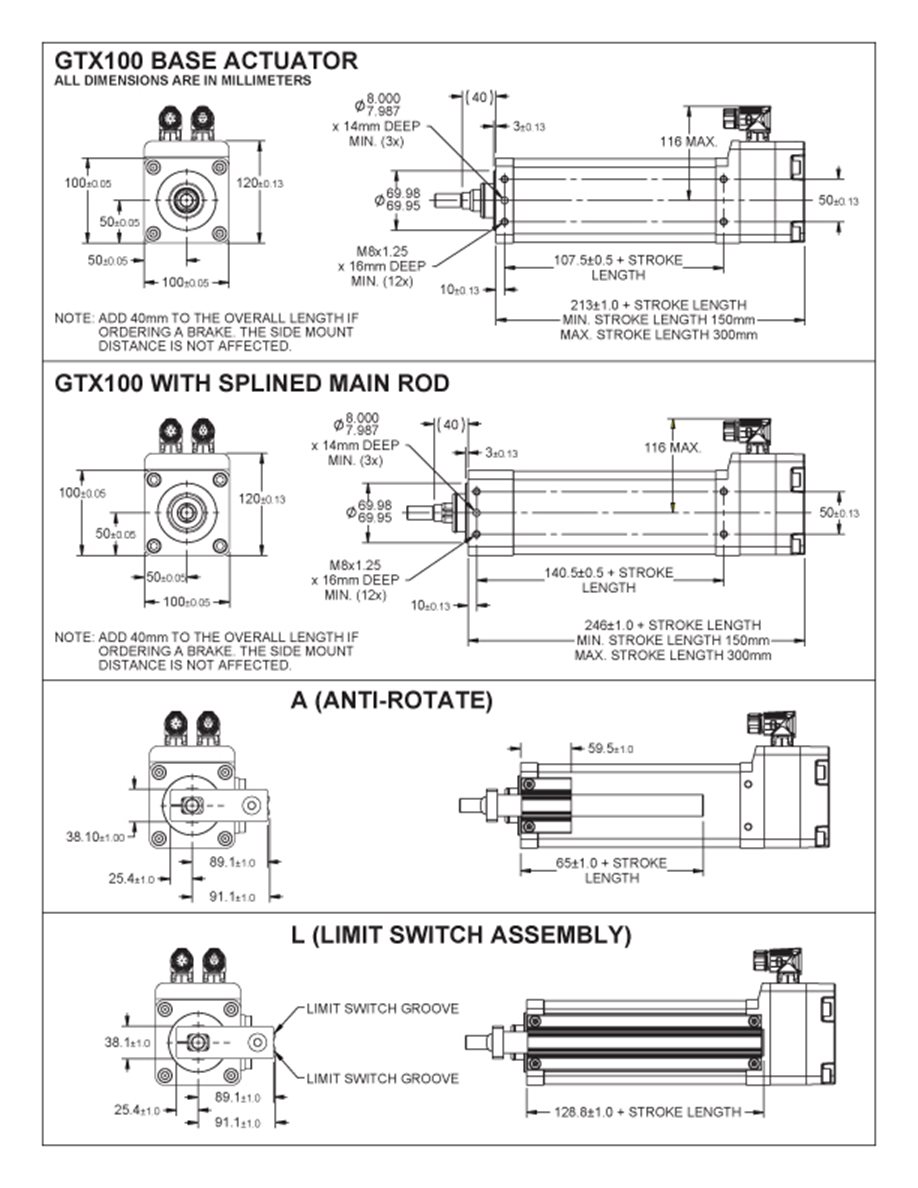
Anti-Rotate, External
This assembly restricts the actuator output rod from rotating when the load is not held by another method. Shorter actuators have a single anti-rotation mechanism; longer lengths have a mechanism on both sides.
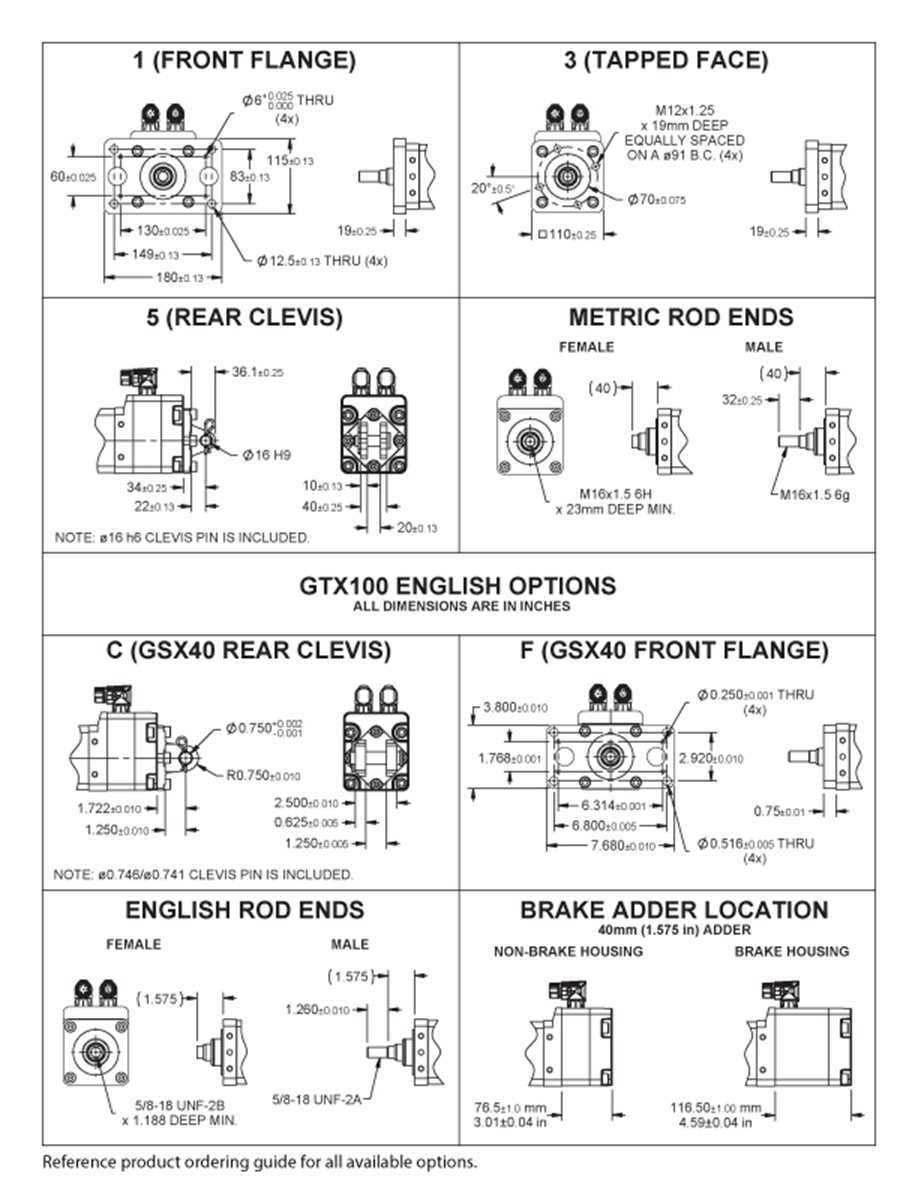
Front Mounting Flange
Front mounting flange, includes thru-holes for face-mounting.
Internal Anti-Rotate (Splined Rod)
A ball spline shafting main rod with a ball spline nut that replaces the standard front seal and bushing assembly. This rod restricts rotation without the need for an external mechanism. The rod diameter will be the closest metric equivalent to our standard rod sizes. Since this option is NOT sealed, it is not suitable for environments in which contaminants may enter the actuator.
Limit Switch Housing/ Anti-Rotate Assembly
External travel switches indicate travel to the controller and are adjustable for either the home or end position. Switches not included.
Rear Clevis, Metric
Rear clevis mount, allows actuator to pivot while in motion
Stainless Steel Rod Option
All thread options on the GTX product line are available in 17-4 stainless steel. This option provides improved corrosion resistance for the main rod of the actuator. This option can be beneficial in applications where the rod could be exposed to harsh chemicals or outdoor environments.
Tapped Face, Metric
Tapped mounting holes in front flange face, allows face-mounting of actuator.