PSA Series
Information in this PSA section is for historical reference only. For new integrated gear motor applications, please see the SLG Series offered by Exlar. PSA Series actuators are perfect for challenging motion applications which require sophisticated, accurate and high performance motion. The PSA Series rotary actuators consist of a brushless permanent magnet motor optimized with an integral planetary gear set for maximum compactness. This compact design is frequently shorter than many commonly applied servo motors found in similar applications. Four frame sizes offer torque capability up to 2000 in-lb and speeds to 1666 RPM with 3, 5, and 10 gear reduction ratios available.
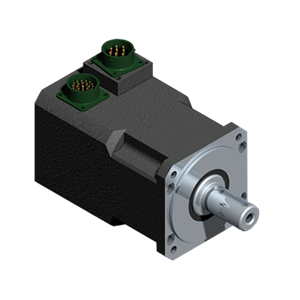
PSA Planetary Geared Servo Motors
Exlar PSA Series actuators offer you one of the highest power densities available in an electric rotary actuator system. Their unique design is especially valued in applications where weight or space is at a premium. We created this very compact package by tucking the front motor bearing into the planet carrier and putting the rear motor bearing into the motor armature. This patented design yields much more torque in a smaller package than traditional servo motor counterparts.
Brushless Servo Motor and Planetary Gears
The PSA Series is comprised of a brushless permanent magnet motor optimized for use with an integral planetary gear set. The motor uses neodymium iron born magnets and is capable of operating speeds to 5000 rpm. Brushless servo design and multiple feedback options make the PSA Series actuators compatible with nearly any manufacturers’ servo drives. This design is perfect for velocity, position and torque control applications. The planet carrier and output shaft is manufactured from a single piece of stainless steel and operates with a pair of oversized ball bearings on either side of the planet gears to assure long life, high rigidity and high side load capacity. The ring and sun gears are each made from a single piece of stainless steel and heat-treated for long lasting performance. Planet gears are also manufactured from stainless steel and heat-treated. The planet gears use precision caged needle roller bearings with a hardened and ground shaft forming the inner race, and the planet gear forming the outer race. This minimizes run out and bearing play assuring very low backlash, under 10 arc-min. Bearing friction is reduced which means your PSA Series actuator will maintain its backlash specifications longer.
Sealed Units
The standard case coating is epoxy powder coat, gray wrinkle finish. All models are greased with a synthetic lubricant containing EP (Extreme Pressure) additives suitable for gears and sealed to the IP65 standard. Viton seals assure maximum seal life and O-rings provide complete sealing of the body of the motor. For more torque and higher power on a continuous basis, an oil cooling option is available.
Standard Metric Dimensions
PSA flanges are designed to make retrofitting easy. They are available in 60, 90, 115, and 142 metric frame sizes with industry standard mounting dimensions.
Benefits of Servo Motor/Gear Reducer Combinations
Many applications require less speed and more torque than is economically available from a servo motor connected directly to the load. A gear reducer trades top end speed, which may not be required, for an increase in output torque. Optionally, PSA motors can be wound to operate at higher than conventional servo motor speeds to further optimize the design for high power and critically compact applications. A servo system’s performance is optimal when the load inertia is similar to the motor inertia. Frequently, instability and settling time delays result if the load inertia is high compared to the motor armature inertia. Gear reducers are the perfect solution for this common phenomenon. The reflected inertia, which is the load inertia as seen by the control system, is reduced by the square of the gear ratio when a gear reducer is employed. For example, a 5 to 1 reduction ratio provides a 25 times reduction in the reflected load inertia ratio, thus assuring stable system operation and optimal machine performance.
Planetary Gears – A Superior Choice
Through the uniform load sharing of several gears acting in concert, planetary gearheads are a very compact, reliable solution with high torque ratings, low backlash and low maintenance. Planetary gears stay well lubricated due to the mixing motion of the planet gears with the outer ring gear. A single drop of oil on one tooth will eventually get evenly redistributed over the entire gear set, which is not the case for gear reducers using non-planetary gear arrangements.
No More Clamp or Pinion Gear Problems
Add-on servo gearheads use a collar clamp to attach the pinion gear to the motor shaft which can easily be misaligned. By integrating our planetary gears within the motor we have eliminated all clamps, pinions and the associated problems.
No Need for a Right Angle Gear Reducer
In the past, right angle reducers were used when the shortest possible motor/gear reducer length was required. Because they use an extra set of bevel gears to make the turn, they are expensive and the extra set of gears compromises both positioning accuracy and working life.