INTELLIGENTER DC-LINEARANTRIEB
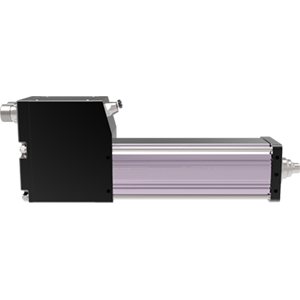
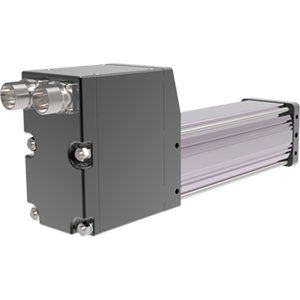
Die DC-betriebene Einheit Tritex II beherbergt einen Servoantrieb, einen digitalen Positionierer und einen elektrischen Aktuator in einem kompakten Paket. Diese fortschrittlichen Aktuatoren bieten die höchste Leistungsdichte und die geringste Stellfläche von Servoantriebsgeräten auf dem Markt. Ihre geringe Größe und ihr innovatives Design machen es einfach, eine vollelektronische Lösung in den Raum Ihres vorhandenen Hydraulik- oder Pneumatikzylinders zu integrieren. Die Aktuatoren der Tritex II-Serie integrieren einen Gleichstrom-betriebenen Servoantrieb, einen digitalen Positionsregler, einen bürstenlosen Motor und einen Linearantrieb in einem kompakten, abgedichteten Gehäuse. Jetzt können Sie Bewegungen präzise steuern und Ihre Anwendungsanforderungen mit einem einzigen, intelligenten DC-betriebenen Aktuator lösen.
DC-Linearantrieb profitiert
von Leistung, Leistung und Zuverlässigkeit
Mit einer Dauerleistung von bis zu 872 lbf (3879 kN), einer Spitzenkraft von bis zu 5293 kN (1190 lbf) und einer maximalen Geschwindigkeit von 800 mm/s (33 in/s) bieten die Tritex II DC-Linearantriebe eine robuste und überlegene Lösung. Die DC-Leistungselektronik bietet maximale Zuverlässigkeit über einen weiten Bereich von Umgebungstemperaturen (-40 bis +65 Grad Celsius). Mit ihrem 750W Servoverstärker und Rollengewindetrieb sind diese Aktuatoren Top-Performer. Serienmäßige Features wie die analoge Anhängerschaft für Position, Compound-Bewegungen, Verkettung und individuelle Kraft-/Drehmomentregelung versetzen Sie auf den Fahrersitz.
Kompaktes Gehäuse und niedrige Betriebskosten
Tritex II ist eine robuste Lösung mit einem kleinen Formfaktor, die stets außergewöhnliche Zuverlässigkeit und Leistung bietet. Da Elektronik und Mechanik in einem einzigen, versiegelten Gehäuse untergebracht sind, werden Platzbedarf und Verkabelung minimiert. Außerdem eliminiert das integrierte Design die Arbeitskosten, die mit der Schalttafelmontage und Verdrahtung verbunden sind. Gleichzeitig eliminiert es kostspielige und wartungsintensive Servokabel und löst gleichzeitig problematische Signalstärkeprobleme.
Weitere Vorteile
- Maximale Leistung, Präzision und Geschwindigkeit in einem kompakten Paket
- Überlegener Ersatz für Pneumatik- und Hydraulikzylinder
- Schutzart IP66S für den Einsatz in rauen Umgebungen
- Das Rollengewindetriebsdesign macht minderwertige ACME- und Kugelgewindetriebslösungen überflüssig
- Programmierbare Software ermöglicht automatisierte Sequenzierung
- Mehrere Feedback-Typen, die am besten zu Ihrer Anwendung passen
- Nahtlose Integration in Ihre Steuerungsarchitektur und Prozesse
- Entwickelt für Closed-Loop-Servosysteme
- 100% Tastverhältnis für Hunderte von Millionen Hub
- Abgedichtetes Gehäuse für längere Lebensdauer und reduzierten Wartungsaufwand
DC-Linearanwendungen
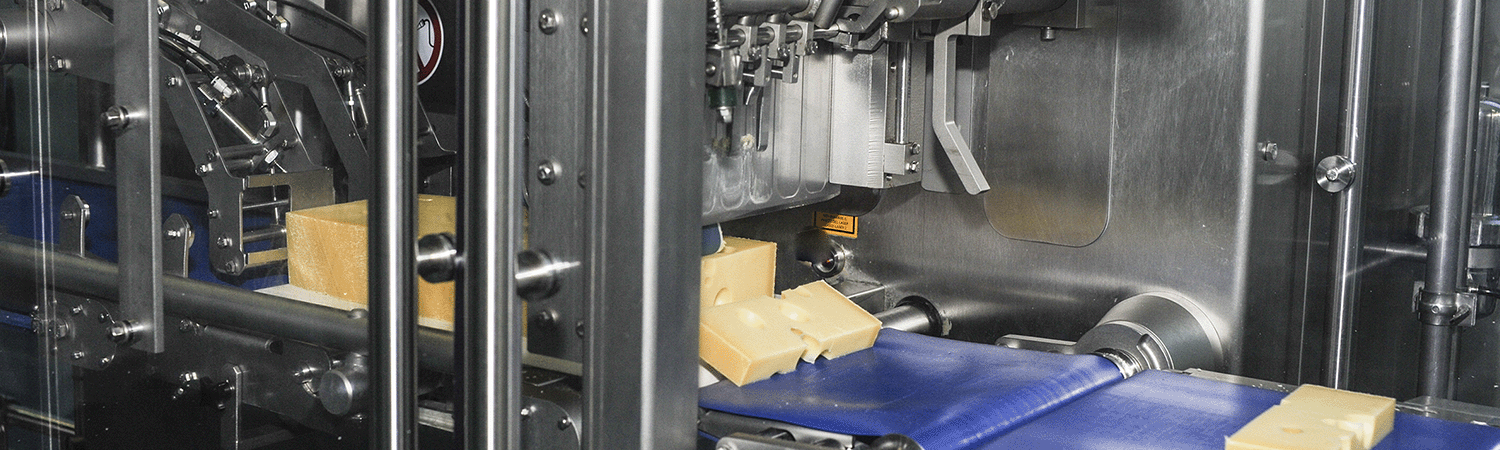
Elektrische Aktuatoren werden in verschiedenen medizinischen Anwendungen eingesetzt, von einfachen Anwendungen bis hin zu komplexeren Anwendungen, die eine größere Kraft, Geschwindigkeit und Steuerung durch den Aktuator erfordern. Ein Beispiel für eine Standard-Low-End-Performance-Aktuatoranwendung ist eine einfache Krankenhausbettverstellung. Der elektrische Aktuator wendet eine minimale Kraft an, um die Betthöhe nach oben oder unten einzustellen, um den Bediener und den Patienten gerecht zu werden. Neben einfachen Anwendungen werden elektrische Aktuatoren auch für Hochleistungsanwendungen wie volumetrische Abfüllung und Flüssigkeitsdosierung eingesetzt, die höhere Kräfte und hohe Taktraten erfordern. Stellen Sie sich beispielsweise eine Anwendung vor, bei der der elektrische Aktuator als Kolbenpumpe verwendet wird, um dem Patienten Flüssigkeit zuzuführen. Bevor Patienten behandelt werden, werden Operationen, medizinische Bildgebungstests, Farbstoffe oder andere Medien injiziert, um Anomalien zu erkennen. Um das Medium erfolgreich einzuspritzen, muss der elektrische Aktuator kompakt sein, eine hohe Kraft erzeugen, um ausreichend Druck zu erzeugen, und die genaue Geschwindigkeit für eine konstante Einspritzrate
beibehalten. Wenn der Aktuator nicht genügend Kraft erzeugt, ist das Injektionsvolumen nicht korrekt, was zu einem potenziellen Schaden für den Patienten und einem möglichen Versagen des nachfolgenden Tests führt. Die Kombination aus erhöhten Kräften und Geschwindigkeitskontrolle führt zu besseren Ergebnissen für die Ärzte und einem einfacheren Verfahren für die Patienten. Andere leistungsstärkere Anwendungen umfassen die Laserpositionierung, die eine hohe Präzision erfordert, und das Ultraschallschweißen, das Stabilität, genaue Position und Geschwindigkeitskontrolle erfordert. Präzise Positionierung, Geschwindigkeitsregelung und Krafterfassung ermöglichen es elektrischen Aktuatoren, diese Anwendungen effektiv auszuführen.
Integration ist der Schlüssel
Mit den erweiterten Funktionen sind elektrische Aktuatoren zu einer primären Option für medizinische Anwendungen geworden. Heute bieten elektrische Aktuatoren mehr Leistung, Kraft, Lastfähigkeit und Steuerung als frühere Versionen, mit anderen Fortschritten, einschließlich kleinerer Größe und Integration von Leistungs- und Steuerungskomponenten. Mit Fortschritten in der Technologie können elektrische Aktuatoren höhere Kräfte liefern, mit Tragzahlen von bis zu 100.000 lbs. und darüber. Um die Anforderungen für Anwendungen zu erfüllen, die hohe Traglastkapazitäten erfordern, bieten elektrische Aktuatoren weiterhin eine Positions- und Geschwindigkeitsregelung, einschließlich Hochleistungspressen und Spritzguss für Medizinprodukte. Viele elektrische Aktuatoren integrieren jetzt den Motor und den Linearantrieb in einem Paket, wodurch die Gesamtgröße des Aktuators reduziert wird. Anstatt die Größe von Motor und Aktuator zu kombinieren, haben die neuesten Versionen eine kompakte Größe von nur dem Motor. Die geringere Stellfläche ermöglicht es, sie in kompakte medizinische Geräte zu integrieren, was dem Hersteller Vorteile bietet, die ein kompakteres Produkt bietet.
Auch Ergonomie und Sicherheitsprobleme können durch die kleinere Größe reduziert werden. Neben einer kompakten Bauweise bieten elektrische Stellantriebe nun auch elektrische Steuerungen und Leistungsschaltungen, die in den Antrieb integriert sind. Frühere Versionen erfordern separat montierte Steuerungen und Leistungsverstärker. Jetzt sind Aktuator, Antrieb und Steuerung vollständig in einem Gerät integriert, sodass keine zusätzlichen Netzteile, separaten Leistungsverstärker und teuren Kabeln erforderlich sind. Dies ermöglicht es dem Hersteller, das gesamte Bewegungssystem in seinem mobilen medizinischen Gerät zu verteilen und nicht an einen stationären Schaltschrank gebunden zu sein.
Elektrische Aktuatoren erzeugen auch weniger Geräusche als ihre Gegenstücke in der Fluidtechnik, was zu einer besseren Erfahrung und einem reibungsloseren Betrieb für Ärzte und Patienten führt. Da sich das Gerät oft in der Nähe des Patienten befindet, muss das Gerät leise arbeiten, um die Angstzustände der Patienten zu reduzieren.
Blick in die Zukunft Die Fortschritte bei elektrischen Aktuatoren verändern die
Art und Weise, wie Designer medizinischer Geräte Gerätedesigns betrachten. Viele medizinische Einrichtungen verlangen jetzt kompaktere Größen und mehr Leistung. Die Integration aller Komponenten eines Bewegungssystems in das Aktuatorpaket ist nur der erste Schritt zum zukünftigen Design elektrischer Aktuatoren. Mit dem technologischen Fortschritt werden Entwickler die Fähigkeiten elektrischer Aktuatoren weiter ausbauen und mehr Kraft, Geschwindigkeit und Kontrolle in einem einzigen, kompakten Paket liefern.