
Exlar Produkte
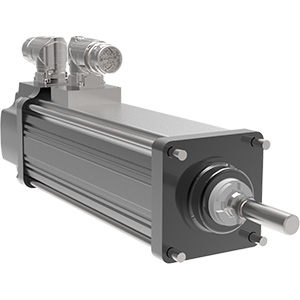
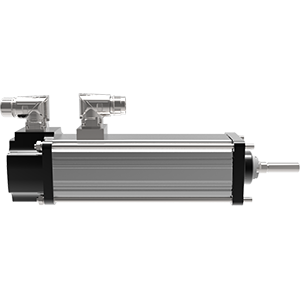
Universelle Linearantriebe
Integrierte Motor-| Aktoren
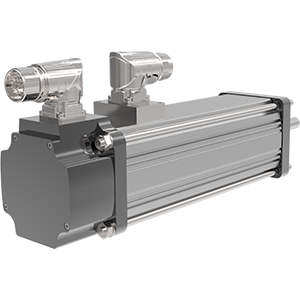
Intelligent Drive | Motor-| Aktoren
Drehantriebe
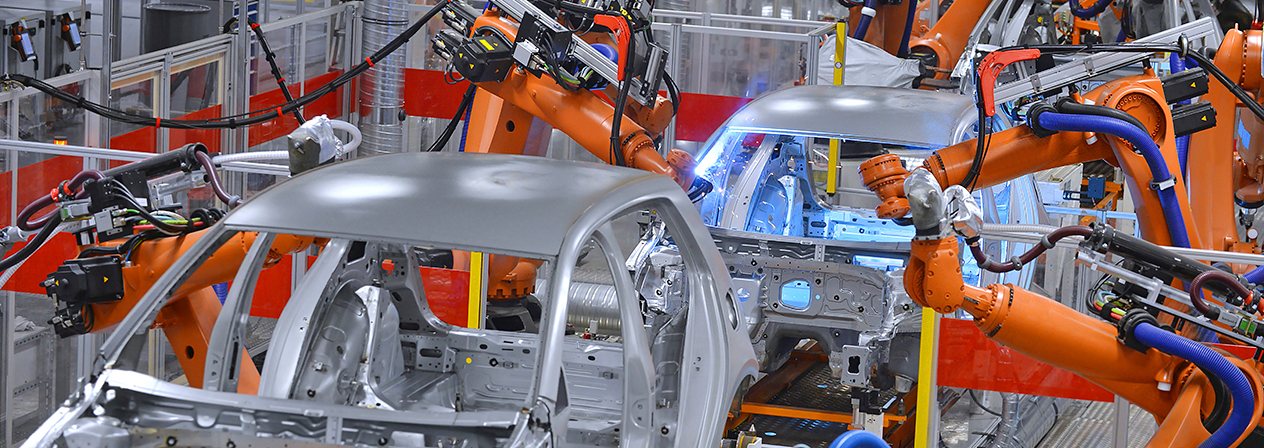
Industrien
Automobil-/EV-Batterie
Lebensmittel & Getränke / Verpackung
Öl- und Gasindustrie
Kunststoffe
Fortstwirtschaft
Unterhaltung / Simulation
Sonstige Branchen






-Order.jpg "GSX-(H)-Order.jpg")














.png "GSX50-0-2-lead-(1).png")







