Industrial - Exlar
适用于 C 型喷枪、X 喷枪或夹式焊枪系统
*假设在公布的性能等级和推荐的全行程补充润滑循环内运行时,焊接循环为 3000 万次。
GTW系列伺服电机|执行器与焊枪机器人系统、夹钳、C 型枪或 X 枪集成! 这些执行器具有内置安装功能,可适应各种焊枪配置以及机器人接口,可实现快速简便的连接。 GTW 系列执行器的使用寿命比普通滚珠丝杠长 15 倍,功率密度提高 3 倍,这意味着 GTW 系列执行器在典型焊缝轮廓下可持续 2000 多万次焊接。
| 型 | 框架尺寸(毫米) | 峰值力 N (磅力) | 連續力 N (磅力) | 最大速度毫米/秒(英寸/秒) |
| GTW080 | 80 (3.15) | 9,480 (2,132) | 4,740 (1,066) | 1,270 (50.0) |
| GTW100 | 100 (3.94) | 24,196 (5,440) | 12,098 (2,720) | 953 (37.5) |

与在运行过程中分散润滑剂的传统滚柱丝杠和滚珠丝杠不同,独特的倒置滚柱丝杠设计将润滑保持在最需要的地方,从而延长了执行器的使用寿命并避免了定期重新润滑所需的停机时间。 优质的密封和刮水器设计通过防止污染物进入螺杆系统,进一步延长了GTW系列执行器的使用寿命。
| 模型: | GTW080, GTW100 |
| 框架尺寸: | 80 mm, 100 mm |
| 行程长度: | 150, 300 mm |
| 螺钉引线: | 2.54, 5.08, 12.70 mm |
| 线速度: | Up to 1,270 mm/sec |
| 峰值推力容量: | 30,784 N |
| 标准/额定值 | CE and UL Certifications, UL Class 180H insulation, IP66S |
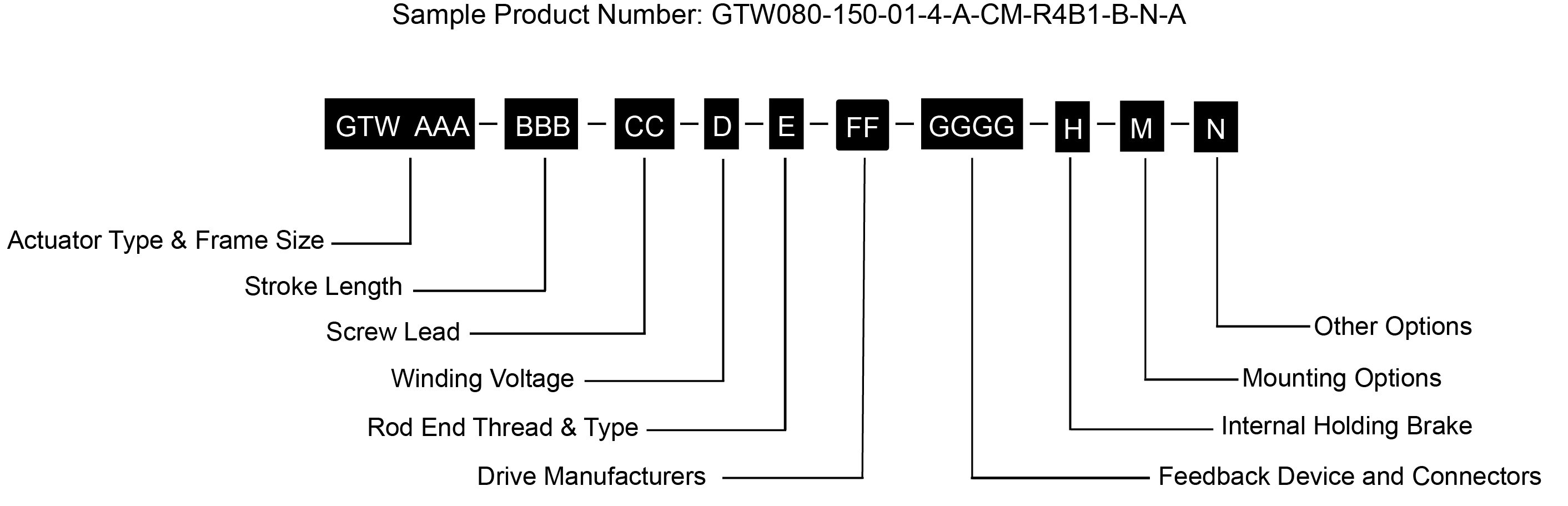 | |
AAA = GTW Integrated Motor / Actuator | FF = Drive Manufacturer |
Drive Manufacturer | Code | Resolver | Encoder |
|---|---|---|---|
ABB | AB | R3A4 | |
Comau | CM | R4B1 | |
Fanuc 64 Bit (Exlar Supplied) | FA | E2E6 | |
Fanuc 64 Bit (Customer Supplied) | FA | E3E7 | |
Fanuc 128 Bit (Exlar Supplied) | FA | E4F0 | |
Fanuc 128 Bit (Customer Supplied) | FA | E5F0 | |
Festo | FE | R1A1 | S1A2 |
Kuka | KU | R5B1 | |
Bosch (Indramat) | IN | S2D3 |
* 某些选项并非在每个配置中都可用。 对于上面未列出的选项或特价,请联系您当地的 Exlar 代表.
防旋转,外部
该组件限制致动器输出杆在负载未被其他方法保持时旋转。 较短的执行器具有单一的防旋转机构; 较长的长度在两侧都有一个机构。
内部防旋转(花键杆)
带球花键螺母的球花键轴系主杆,取代了标准前密封件和衬套组件。 该杆无需外部机构即可限制旋转。 杆直径将是最接近的公制,相当于我们的标准杆尺寸。 由于此选项不是密封的,因此它不适用于污染物可能进入致动器的环境。
限位开关外壳/防旋转组件
外部行程开关指示到控制器的行程,并可针对原点或终端位置进行调节。 不包括开关。
| MODEL CODE | NOMINAL STROKE LENGTH MM (IN)* | SCREW LEAD MM (IN) | PEAK FORCE RATING N (LBF) | CONTINUOUS FORCE RATING N (LBF) | MAX VELOCITY MM/S (IN/S) | DYNAMIC LOAD RATING N (LBF) | ARMATURE INERTIA KG-M2 (IN-LB-S2) |
|---|---|---|---|---|---|---|---|
| GTW080-150-01 | 150 (5.9) | 2.54 (0.1) | 16,730 (3,762) | 8,365 (1,881) | 254 (10.0) | 24,535 (5,516) | 0.000369 (0.003267) |
| GTW080-150-02 | 150 (5.9) | 5.08(0.2) | 9,480 (2,132) | 4,740 (1,066) | 508 (20.0) | 25,798 (5,800) | |
| GTW080-150-05 | 150 (5.9) | 12.7(0.5) | 4,016 (902) | 2,008 (451) | 1,270 (50.0) | 21,795 (4,900) | |
| GTW080-300-01 | 300 (11.8) | 2.54 (0.1) | 16,730 (3,762) | 8,365 (1,881) | 254 (10.0) | 24,535 (5,516) | 0.000455 (0.004029) |
| GTW080-300-02 | 300 (11.8) | 5.08 (0.2) | 9,480 (2,132) | 4,740 (1,066) | 508 (20.0) | 25,798 (5,800) | |
| GTW080-300-05 | 300 (11.8) | 12.7 (0.5) | 4,016 (902) | 2,008 (451) | 1,270 (50.0) | 21,795 (4,900) |
*Full end to end stroke is 10 mm greater than nominal
Maximum velocities listed at maximum voltage (460 VAC) See Speed Force charts for speeds at various voltage levels
Continuous force rating based upon 25°C operation
| MOTOR VOLTAGE | 4 (AC) | |
|---|---|---|
| Specifications subject to change without notice. Test data derived using NEMA recommended aluminum heatsink 10" x 10" x 1/4" at 25°C ambient. VAC class winding operational from 115 - 460 VAC. VDC Class winding operational from 24 - 48 VDC. Rotational speed linear proportional to input voltage | ||
| Max Bus Voltage | V | 460 Vrms |
| Speed @ Bus Voltage | RPM | 6000 |
| RMS Sinusoidal Commutation | ||
| Continuous Motor Torque | Nm | 4.51 |
| lbf-in | 39.9 | |
| Continuous Current Rating | A | 4.9 |
| Peak Current Rating | A | 9.9 |
| Torque Constant (Kt) (+/– 10% @ 25˚C) | Nm/A | 1.02 |
| lbf-in/A | 9 | |
| Voltage Constant (Ke) (+/– 10% @ 25˚C) | V/kRPM | 61.6 |
| 0 - Peak Sinusoidal Commutation | ||
| Continuous Motor Torque | Nm | 4.51 |
| lbf-in | 39.9 | |
| Continuous Current Rating | A | 6.9 |
| Peak Current Rating | A | 13.8 |
| Torque Constant (Kt) (+/– 10% @ 25˚C) | Nm/A | 0.72 |
| lbf-in/A | 6.4 | |
| Voltage Constant (Ke) (+/– 10% @ 25˚C) | V/kRPM | 87.1 |
| Pole Configuration | Number of Poles | 8 |
| Resistance (L-L) (+/– 5% @ 25˚C) | Ohms | 2.5 |
| Inductance (L-L)(+/– 15%) | mH | 17.3 |
| Electrical Time Constant | ms | 6.8 |
| Insulation Class | 460 VAC Max, 180°C (Class H) | |
| GTW080 Weights | |
|---|---|
| Description | kg (lb) |
| GTW080-150 | 5.2 (11.4) |
| GTW080-300 | 7.0 (15.4) |
| Brake Adder | 1.1 (2.5) |
| Front Flange (1) | 1.0 (2.2) |
| Tapped Face (3) | 0.6 (1.2) |
| Rear Clevis (5) | 0.4 (0.8) |
| Imperial Flange (F) | 0.8 (1.8) |
| Imperial Clevis (C) | 0.8 (1.7) |
| Anti Rotate (150 mm stroke) | 0.6 (1.3) |
| Anti Rotate (300 mm stroke) | 0.8 (1.8) |



| MODEL CODE | NOMINAL STROKE LENGTH MM (IN)* | SCREW LEAD MM (IN) | PEAK FORCE RATING N (LBF) | CONTINUOUS FORCE RATING N (LBF) | MAX VELOCITY MM/S (IN/S) | DYNAMIC LOAD RATING N (LBF) | ARMATURE INERTIA KG-M2 (IN-LB-S2) |
|---|---|---|---|---|---|---|---|
| GTW100-150-01 | 150 (5.9) | 2.54 (0.1) | 30,784 (6,920) | 15,392 (3,460) | 191 (7.5) | 54,557 (12,266) | 0.0014085 (0.012467) |
| GTW100-150-02 | 150 (5.9) | 5.08 (0.2) | 24,196 (5,440) | 12,098 (2,720) | 381 (15.0) | 55,972 (12,584) | |
| GTW100-150-05 | 150 (5.9) | 12.7 (0.5) | 10,888 (2,448) | 5,444 (1,224) | 953 (37.5) | 37,141 (8,350) | |
| GTW100-300-01 | 150 (5.9) | 2.54 (0.1) | 30,784 (6,920) | 15,392 (3,460) | 191 (7.5) | 54,557 (12,266) | 0.0017399 (0.015399) |
| GTW100-300-02 | 300 (11.8) | 5.08 (0.2) | 24,196 (5,440) | 12,098 (2,720) | 381 (15.0) | 55,972 (12,584) | |
| GTW100-300-05 | 300 (11.8) | 12.7 (0.5) | 10,888 (2,448) | 5,444 (1,224) | 953 (37.5) | 37,141 (8,350) |
| MOTOR VOLTAGE | 4 (AC) | |
|---|---|---|
|
Specifications subject to change without notice. * For actuators with a 0.1” lead, the torque and current must be limited to 8.89 nm/9.0 a not to exceed the continuous force rating specified in the mechanical specifications table on page 6. Peak torque and current values would be 2x the continuous values |
||
| Max Bus Voltage | V | 460 Vrms |
| Speed @ Bus Voltage | RPM | 4500** |
| RMS Sinusoidal Commutation | ||
| Continuous Motor Torque | Nm | 12.23 |
| lbf-in | 108.2 | |
| Continuous Current Rating* | A | 12.3 |
| Peak Current Rating* | A | 24.7 |
| Torque Constant (Kt) (+/– 10% @ 25˚C) | Nm/A | 1.11 |
| lbf-in/A | 9.8 | |
| Voltage Constant (Ke) (+/– 10% @ 25˚C) |
V/kRPM | 67 |
| 0 - Peak Sinusoidal Commutation | ||
| Continuous Motor Torque | Nm | 12.23 |
| lbf-in | 108.2 | |
| Continuous Current Rating | A | 17.4 |
| Peak Current Rating | A | 34.9 |
| Torque Constant (Kt) (+/– 10% @ 25˚C) |
Nm/A | 0.78 |
| lbf-in/A | 6.92 | |
| Voltage Constant (Ke) (+/– 10% @ 25˚C) | V/kRPM | 94.8 |
| Pole Configuration | Number of Poles | 8 |
| Resistance (L-L) (+/– 5% @ 25˚C) | Ohms | 0.65 |
| Inductance (L-L)(+/– 15%) | mH | 4.6 |
| Electrical Time Constant | ms | 7.1 |
| Insulation Class | 460 VAC Max, 180°C (Class H) | |
| Description | kg (lb) |
|---|---|
| GTW100-150 | 13.1 (28.8) |
| GTW100-300 | 16.0 (35.2) |
| Brake Adder | 1.2 (2.7) |
| Front Flange (1) | 2.2 (4.7) |
| Tapped Face (3) | 1.1 (2.4) |
| Rear Clevis (5) | 0.8 (1.8) |
| Imperial Flange (F) | 1.9 (4.1) |
| Imperial Clevis (C) | 1.1 (2.5) |
| Anti Rotate (150 mm stroke) | 1.5 (3.2) |
| Anti Rotate (300 mm stroke) | 2.0 (4.5) |

.jpg "GTW100-0-2-in-lead-VAC-(1).jpg")
.jpg "GTW100-0-5-in-lead-VAC-(1).jpg")

以下是给定输入电流占比连续额定电流百分比时,您的应用的最大允许占空比:
例如: 如果您的执行器的连续额定电流为 10 A,连续额定力为 1000 lbf,则意味着产生 1000 lbf 的力需要大约 10 A,产生 500 lbf 的力需要 5 A,依此类推。 如果您需要推动超过1000磅的重量怎么办? 在大多数情况下,您会考虑更强的定子或更大的致动器。 如果只有几秒钟呢? 您是否会过度使用当前的执行器? 答案是肯定的,计算多少并不难。
假设您需要推动1500 lbf。 这相当于10 A连续额定电流的1.5倍。 如果您看下面,图表建议在这种情况下占空比不超过22%。 这意味着您可以在15 A电流下运行执行器22%的时间而不会过热。 另外78%的时间,它需要关闭/冷却。

在峰值电流下可以运行多长时间?
不是一个简单的问题,也不是一个简单的答案。 实际上,影响这一点的因素有很多(系统是如何构建的,执行器散热的能力如何,是否有额外的散热器,空气中的颗粒,真空度,每次新的启动温度? (即并不总是从冷开始等)。 因此,精确的时间和温度很难估计。
例如: 在峰值电流(2x连续)时,允许的占空比为4%。 这并不意味着只要您有96个小时的休息时间,您就可以连续跑步4小时。 根据经验,我们估计的一个很好的经验法则是峰值电流运行时间为30秒到一分钟。 试着把它放在下面,然后当然让它冷却96%的时间。
我们经常被问及再润滑间隔。 现实情况是,没有通用的间隔来重新润滑执行器。 它取决于很多事情,每个应用和情况都不同,几乎不可能准确计算每个应用的再润滑间隔。 因此,我们有一个粗略的指南表(如下所示),让用户了解何时开始检查需要更换的旧污染润滑脂。 但是,由于环境温度,散热,速度变化,空气中的颗粒等可能因应用而异,因此这只是一个指南。 在此表建议的时间段内,应更频繁地检查致动器,一旦注意到润滑脂已准备好更换(脏污,污染/非常暗,充满颗粒/碎屑), 就可以确定重新润滑间隔。
请记住,润滑脂需要清理和更换 - 不要只是插入更多。 (除了FTX,在需要清理之前,它们可以处理5-6个润滑)
| 均方根转速 (转速) | 建议的润滑脂更新期(小时) |
|---|---|
| 250 | 10,000 |
| 500 | 10,000 |
| 1000 | 8000 |
| 1500 | 7000 |
| 2000 | 5800 |
| 2500 | 5000 |
| 3000 | 4000 |
对我们来说,这是一个非常普遍的问题。 对于执行器本身来说,这很容易。 螺钉的机械导程精度通常为0.001 in/ft,这是任何类型的精密定位螺钉的典型规格。 这意味着在螺钉累积长度的任意点上,每英尺螺钉长度的最大变化为 0.001 英寸。 这与机械可重复性不同。 机械可重复性是螺钉从同一方向接近并驱动完全相同的匝数时,螺钉返回的相同线性位置的公差。 此值约为 0.0004 英寸。
电子定位分辨率是反馈装置和伺服放大器的功能。 假设我们在GSX30上有Exlar的标准编码器,滚柱丝杠上每转引线为0.2英寸。 Exlar 的标准编码器每转有 2048 条线路和 8192 个电子脉冲,可输出到伺服驱动器。 因此,在理想情况下,定位分辨率将为(0.2英寸/转)/(8192脉冲/转)或0.0000244英寸。 任何使用过伺服驱动器的人都知道,您不能定位到一个编码器脉冲。 让我们使用10个编码器脉冲作为合理的最佳定位能力。 这为我们提供了0.000244英寸的定位分辨率。
需要考虑的更多事项: 在考虑可重复性和准确性时,还必须考虑几个因素。 其中之一是系统的刚度。 刚度是系统在压缩力或拉伸力下拉伸或压缩的程度。 如果执行器的刚度和机械系统的刚度(包括所有联轴器、安装面等)的组合允许比系统所需的定位分辨率更多的压缩或拉伸,那么获得可接受的定位结果几乎是不可能的。 另一个考虑因素是热膨胀和收缩。 考虑一个GS执行器连接到正在执行精密磨削过程的刀具上。 假设工具是钢的,长12英寸,温度升高5度将导致工具膨胀0.0006英寸。 如果系统被编程为进行0.0002英寸的移动,则这种扩展可能会导致严重的定位问题。 这同样适用于执行器本身的组件。 执行器杆的温度可以从冷启动到运行温度变化。 在非常精确的定位应用中,可能需要考虑这种变化。
Please log in or register to use our quote request tool, with this you can view and download 3D and 2D models and drawings, as well as build and submit a quote request.
If you do not have a login, please proceed to the registration page
RegisterIf you currently have an Exlar website account and would like to delete it, please contact